groundTruth
地面真值标记数据
描述
从数组中创建对象检测器的培训数据
groundTruth对象,使用objectDetectorTrainingData函数。从数组中创建语义分割网络的训练数据
groundTruth对象,使用pixelLabelTrainingData函数。
创建
出口A.groundTruth对象,在应用程序工具条上,选择出口标签>到工作空间.应用程序将对象导出到MATLAB®工作区。创建一个groundTruth对象编程时,使用groundTruth函数(这里描述)。
属性
数据源- - - - - -地面真理数据的来源
groundTruthDataSource对象
地面真实数据的来源,指定为groundTruthDataSource对象。该对象包含描述地面真实数据被标记的视频、图像序列或自定义数据源的信息。
要从原始数据源访问图像,请使用VideoReader或者imageDatastore.您还可以使用自定义读取功能。有关详细信息,请参见使用自定义图像源阅读器进行标记.
标签- - - - - -标签定义
桌子
此属性是只读的。
标签定义,指定为表。要创建此表,请使用其中一个选项。
在其中一个标记应用程序中,创建标签定义,然后将它们导出为a的一部分
groundTruth对象。使用一个
labelDefinitionCreator对象生成标签定义表。如果将此表保存到Mat文件,则可以通过选择将标签定义加载到标签应用程序会话中负载>标签定义从应用程序工具条。在MATLAB命令行中创建标签定义表。
此表介绍了所指定的表所需和可选列标签财产。
| 列 | 描述 | 必需的或可选的 |
|---|---|---|
的名字 |
指定每个标签定义的名称的字符串或字符向量。 | 要求 |
类型 |
labelType指定每个标签定义的类型的枚举,例如矩形或者场景. |
要求 |
LabelColor. |
指定标签定义颜色的RGB三联体的1乘3行向量。取值范围是[0,1]。黄色(RGB三元组[1 1 0])保留给标签应用中所选标签的颜色。 | 可选 在标签应用程序中定义标签时,必须指定颜色。因此,导出的标签定义表始终包含此列。 属性创建标签定义时 |
PixelLabelID |
标量,列向量,或者米整值标签id的-乘3矩阵。PixelLabelID指定用于表示标签定义的像素标签值。像素标签ID值必须在0到255之间。 |
可选 在标签应用程序中定义像素标签或 在MATLAB命令行创建标签定义表时,如果您设置 |
团体 |
指定每个标签定义所属组的字符串或字符向量。 | 可选 如果您在MATLAB命令行上创建标签定义表,则不需要包含 如果从标签应用程序导出标签定义或使用A创建它们 |
描述 |
描述每个标签定义的字符串或字符向量。 | 可选 如果您在MATLAB命令行上创建标签定义表,则不需要包含 如果从标签应用程序导出标签定义或使用A创建它们 |
层次结构 |
包含每个标签定义的Sublabel和属性数据的结构。为了一个例子层次结构格式,请参阅开始使用图像贴标程序或者开始使用视频标签. |
可选 在标签应用程序中,当您定义子标签或属性时,导出 |
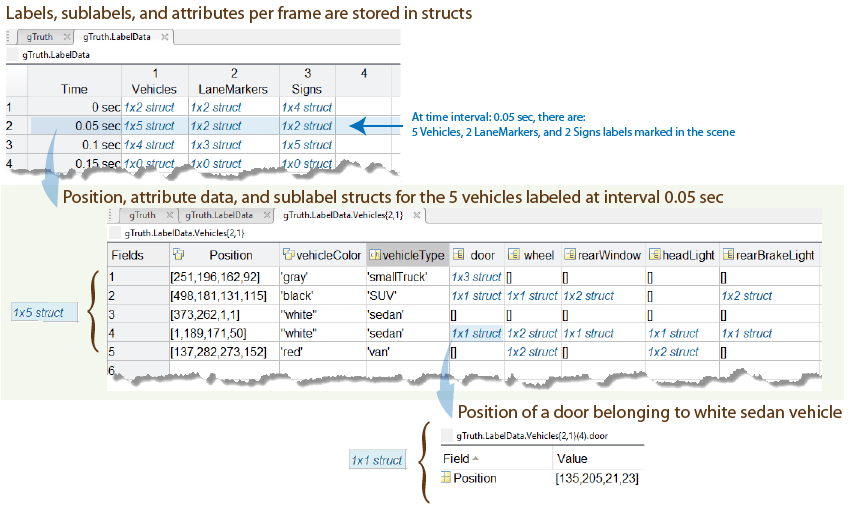
例如,考虑一个名为标签定义的表天空,植被,车道,StopSign, 和车辆,这是从贴标签机视频应用程序。

标签定义包括像素标签,因此表包括一个
PixelLabelID列。其中两个标签包含属性,因此应用程序创建了一个
层次结构应用于所有标签定义的列。标签定义没有分配的组,因此
团体列是“没有”用于所有标签定义。
LabelData- - - - - -每个ROI和场景标签的标签数据
桌子|时间表
此属性是只读的。
每个ROI和场景标签的标签数据,指定为a桌子用于图像收集或时间表用于视频或图像序列。每一列的LabelData持有单个标签定义的标签,并对应于的名字中的每一行的值标签.这些LabelData描述表的元素。标签类别指定为labelType枚举。
或者,对于按标签类型分组的ROI标签数据,使用单列标记roilabeldata.,可以使用并指定为包含至少一个标签类型的结构,rectangledata.,Polygondata.,LineData, 或者ProjCuboidData.
表中描述了每个标签类型的存储格式。
| 标签类型 | 每个时间戳的标签的存储格式 |
|---|---|
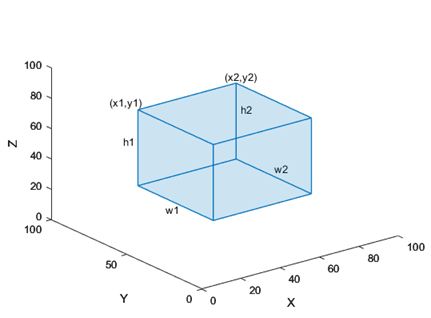
labelType。矩形 |
|
|
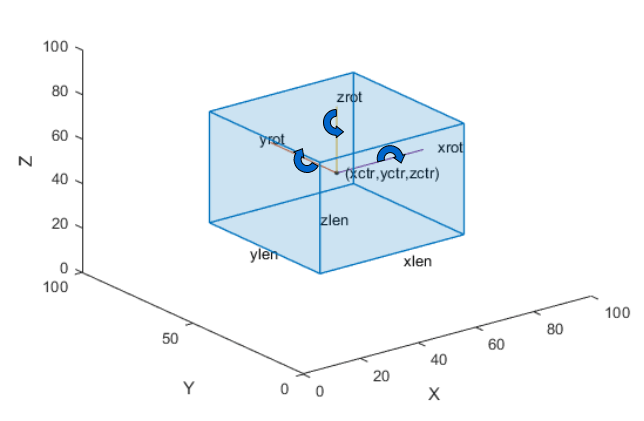
该图显示了这些值如何确定立方体的位置。
|
|
该图显示了这些值如何确定立方体的位置。
|
labeltype.line.line. |
|
labeltype.pixellabel. |
所有像素标签定义的标签数据存储在一个单独的米1 |
labeltype.polygon. |
|
labeltype.custom. |
标签被精确地存储在时间表中指定的位置。如果您导入groundTruthMultisignal对象中包含自定义标签数据的地面实况贴标签机app,此数据不导入app。在收集标签数据进行训练时,使用自定义数据,并将其与app中的标签数据相结合。 |
金宝app支持GroundTruth对象
| 视频贴标签机应用 | 图片标志应用程序 | |
|---|---|---|
| 数据源 | 视频文件,图像序列文件夹,自定义阅读器 | 图像文件 |
| 标签定义 | 矩形,行,PixelLabel, 或者场景标签类型 |
矩形,行,PixelLabel, 或者场景标签类型 |
| 标签数据 | 时间表矩形,行,PixelLabel, 或者场景标签类型 |
桌子(没有时间表)矩形,行,PixelLabel, 或者场景标签类型 |
添加非ROI的地面真理数据(矩形,行,PixelLabel)或场景标签类别到agroundTruth对象,提供带有一个标签定义labelType这是自定义.当你将自定义数据加载到标签应用程序中时,它是不可见的。
对象的功能
SelectLabelsByGroup. |
根据标签组选择基础真值标签 |
SelectLabelsByType. |
根据标签类型选择地面真值标签 |
selectlabelsbyname. |
按标签名称选择地面真理标签 |
换行员 |
在地面真实数据中更改文件路径 |
gatherLabelData |
从地面收集标签数据 |
例子
提示
groundTruth基于视频的数据源的对象依赖于操作系统的视频阅读功能。一个groundTruth使用视频数据源创建的对象仅适用于使用用于创建它的相同的平台一致。创建一个独立的平台groundTruth对象,将视频转换为图像序列,并将图像序列包含相关的时间戳。
另请参阅
应用程序
功能
对象
您还可以从以下列表中选择一个网站:
