Control System Toolbox
Progettazione eanisi di sistemi di controllo

控制系统工具箱™Fornisce Algoritmi E Analazioni Per Analizzare,Progettare E Rogolare Sistematicamente I Sistemi Di Controllo Lineari。è可以特定的IL Sistema来Funzione di Trasferimento,Modello Stato-Spazio,Rappresentazione Poli-Zeri-Guadagno O Risoposta在熟悉景区。le app e lefunzionalità,quali il grafico della risto allo scalino e Il dightma di bode,Consentono di Analizzare e Visualizzare Il Comportameno del Sistema Nel Dominio del Tempo e Nel Dominio della ayerza recalza。
我相信regolare parametri del compensatoreusando tecniche interattive come il Bode loop shaping e il metodo del luogo delle radici. Il toolbox regola automaticamente entrambi i compensatori SISO e MIMO, inclusi i controller PID. I compensatori possono includere più blocchi regolabili che coinvolgono diversi cicli di feedback. È possibile regolare controllori gain-scheduled e specificare più obiettivi di regolazione, come l’inseguimento del segnale di riferimento, la reiezione ai disturbi e i margini di stabilità. Si può poi convalidare il progetto verificando il tempo di salita, la sovraelongazione, il tempo di assestamento, i margini di guadagno e di fase e altri requisiti.
Inizia Ora:

Funzioni di Trasferimento E Modelli Stato-Spazio
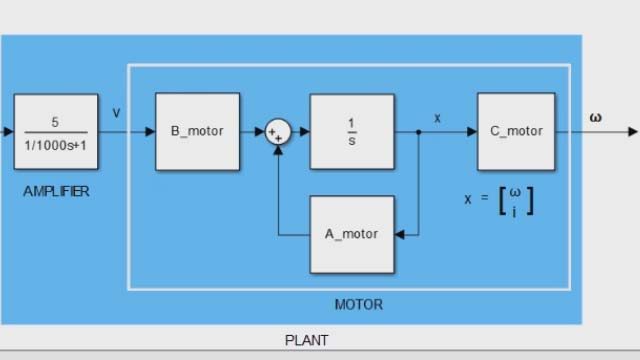
Crea modelli di sistemi lineari tempo-invariante utilizzando le funzioni di trasferimento o le rappresentazioni stato-spazio. Manipola i controller PID e i dati di risposta in frequenza. Modella sistemi SISO o MIMO, continui o discreti. Costruisci diagrammi a blocchi complessi collegando modelli di base in serie, in parallelo o in retroazione.
Discretizzazione dei modelli
Urilizza Le Funzioni ARiyaIvitàSterntiativeDi Live Editor Per Ricpli Di Sistemi Dinamici E Contractire I Modelli Tra Domini A Tempo Continuo e A Tempo Solfeto。Urilitizza IL Metodo Zero-Order Hold,Bilineare(Tustin),Corrispondenza Poli-Zeri e Altri Metodi Di Cuxvense。

Esplora la galleria (2 immagini)
Riduzione di modelli
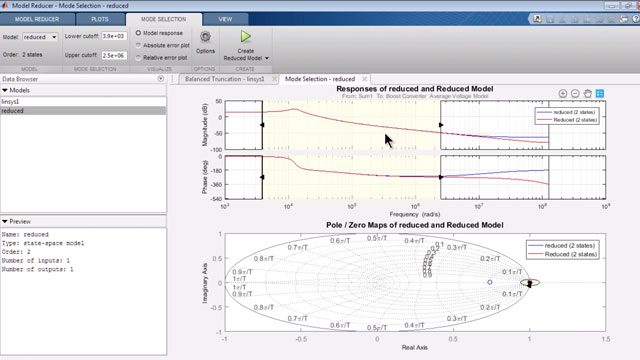
Urilizza L'App Model Reducer,L'Attivitàdi Live Editor o Le Funzioni每rigure of Modo Interativo L'Ordine Dei Modelli degli Impianti of Dei Controlly Deganyo Le Dinamiche Imagene Inalimanciali,Permandi an Amainzioni of Modely of Modelli andimandi。Urilizza Le Tecniche di Troncamento Bilanciato,Semplificaione Poli-Zero O Selezione DellaModalità。
Analisi nei domini di tempo e frequenza
Utilizza l’app Linear System Analyzer per visualizzare e mettere a confronto le risposte in tempo e frequenza tra più modelli utilizzando la risposta allo scalino e la risposta all'impulso, i diagrammi di Bode, Nichols e Nyquist, la rappresentazione del valore singolare e il diagramma poli-zeri. Esamina le caratteristiche come il tempo di salita, il tempo di assestamento e l’overshoot massimo.
Analisi della stabilità
Calcola IL Margine Di Guadagno,IL Mangine Di Fase e Le Mailenze Crossover。esamina le posizioni dei poli e dello zero di sistemi dinamici一个livello grafico e numerico。Calcola IL CoeffITIETE DI Smorzamento,La Fromenza Naturale E La Costante di Tempo Dei Poli Dei Un Modello Lineare。

Calcolo dei margini di guadagno, dei margini di fase e delle frequenze crossover.
Passivitàevincolisettiliali
Calcola Diverse Misure DiPassivitàPerSistemiLineari Tempo-Invariante。analizza i sistemi per lapassivitàeivincoli conici-settiliali arbitrari。

Esplora la galleria (2 immagini)
regolazione PID
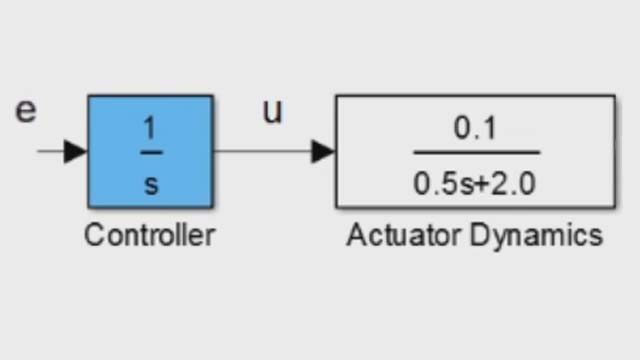
Utilizza l’app PID Tuner, l’attività di Live Editor o le funzioni a riga di comando per regolare automaticamente i guadagni del controller PID e bilanciare prestazioni e robustezza. Specifica i parametri di regolazione, quali il tempo di risposta e il margine di fase desiderati. Regola controller PID continui o discreti.
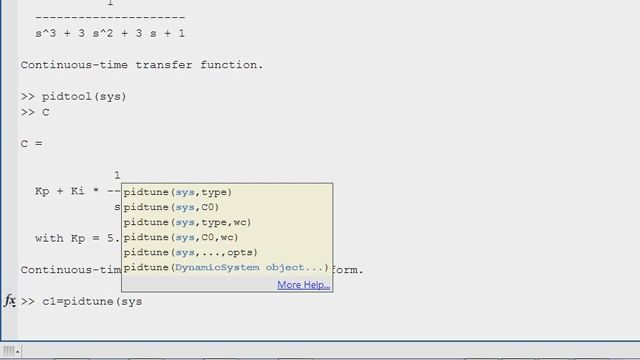
Stima Interativa della diaamica di Un Impianto
CREA UN Modello DI UN Impianto DAI DI DI输入 - 输出Misurati Direttame Nell'App PID调谐器Utilizzando系统识别工具箱™。同权利,每个Idendare Le Dinamiche Dell'Impianto E GultoLare IL Controller PID。

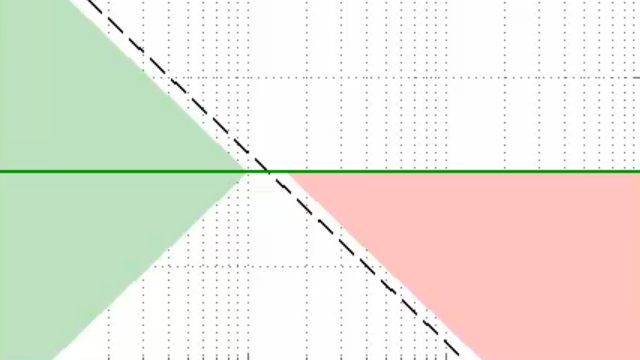
Controllo PID2-DOF
Regola i controller PID con due gradi di libertà (2-DOF). Utilizza un controller PID 2-DOF al posto di un controller PID 1-DOF per ottenere una migliore reiezione ai disturbi senza un aumento significativo dell’overshoot nell’inseguimento dei segnali di riferimento.

RegoLazione di UN控制器PID 2-DOF(LINEA COLLUA)E Confronto Con UN控制器PID 1-DOF(LINEA TRATTEGGIATA)NELL'APPLICAZIONE PID调谐器。
Progettazione interattiva mediante il luogo delle radici e diagrammi di Bode
Utilizza l’app Control System Designer per progettare in modo interattivo e analizzare sistemi di controllo SISO. Regola graficamente i comuni componenti di controllo quali PID, reti di anticipo/ritardo e filtri eliminabanda utilizzando il luogo delle radici, i diagrammi di Bode e i diagrammi di Nichols.
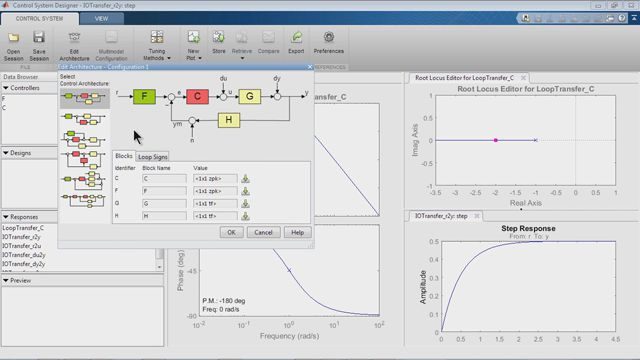
Monitoraggio con risposta ad anello chiuso
Visualizza Le Risposte Ad Anello Aperto E Chiuso Utilizzando DiagrageMi di Risposta Allo Scalino,Nyquist E Altri Dearkmi Che Si Aggiornano在Modo Dinamico的基础Alla Regolazione del控制器。特定的e valuta i Requisiti di progettazione nel dominio del tempo e della ay reaterza来到Il Tempo di salita,l'sumerhoot massimo,Il mangine di guadagno e il mangine di fase。
Progettazione multi-loop
Regola controller costituiti da più anelli SISO. Chiudi sequenzialmente gli anelli SISO, visualizza le interazioni tra gli anelli e regola in modo iterativo ciascun anello per ottimizzare le prestazioni complessive.

esplora la galleria(3 Immagini)
Anelli SISO e MIMO
Urilizza L'App控制系统调谐器O Le Funzioni A Riga Di Comando每种Modellare e Regolare le Architetture dei Sistemi Di Controllo Siso O Mimo Con Semplici Elementi Regolabili,来我Guadagni,I Controllori PID O I Filtri di Ordine Basso。UN SISTEMA DI Controllo Multi-Loop中的Robola Congiuntamente Diversti Anelli。
Obiettivi nel dominio del tempo e della frequenza
Specifica e visualizza i requisiti di regolazione, come le prestazioni di tracciamento, reiezione ai disturbi, amplificazione del rumore, posizioni dei poli a circuito chiuso e margini di stabilità. Sintonizza automaticamente i parametri del controller per soddisfare i requisiti indispensabili (vincoli progettuali) e per soddisfare al meglio gli altri requisiti (obiettivi).
Regolare in base a una serie di modelli di impianto
Progetta un controller resistente ai cambiamenti delle dinamiche dell’impianto, a causa di variazioni dei parametri e delle condizioni operative e di guasti ai sensori o agli attuatori.

Progettazione di Un控制器电阻alle variazioni dei parametri dell'impianto。
控制器在Simulink中增益预定金宝app
Modella sistemi di Controllo在Simulink中加入定时金宝app®utilizzando blocchi come il controller PID variabile, la funzione di trasferimento variabile, il filtro eliminabanda variabile e il filtro passa-basso variabile.

每个LA Modellazione DI控制器的Libreria在Simulink中加入。金宝app
regolazione delle superfici di guadagno
Robola自动词典I CoffITIEI DELLE SUPEFI DI GUADAGNO每个SOPDISFARE I REARISITI PRESTAZIONGII NEL LIMITE DI ESERCIZIO DEL SISTEMA E OTTIMIZZARELE TRANIZIONI TRA I Punti Operativi。COMPERISIIONIIONIIONI的特定事项I Requisiti Che Variano手术。Valida I Risutati di Regolazione在Tutto L'Intervallo Operativo del Tuo Progetto。
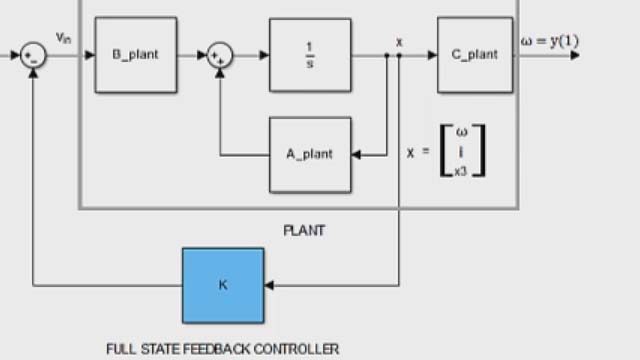
LQR/LQG e posizionamento dei poli
Progetta Regolatori Lineari Quadratici Iscleti E Continui(LQR)e控制器Lineari Quadratici Gaussiani(LQG)。Calcola Le Matrici di Guadagno Di反馈每席位I Poli Ad Anello Chiuso Nelle Posizioni Desizate。
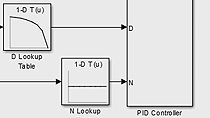
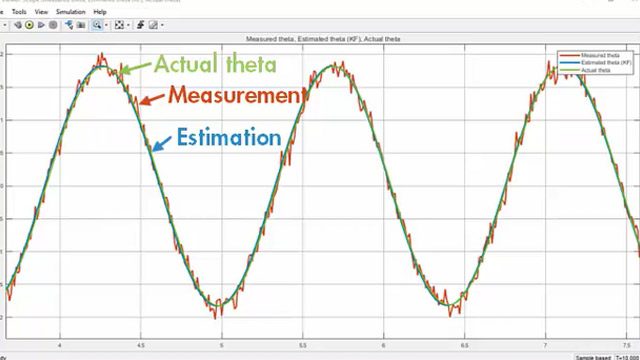
Filtri di Kalman.
Progetta e simula filtri di Kalman lineari stazionari e variabili nel tempo. Genera codice C/C++ per questi filtri utilizzando MATLAB Coder™ e Simulink Coder™.
Stimatori di Stato非线性
Stima gli stati di sistemi non lineari utilizzando filtri Kalman estesi e unscented o filtri particolati in MATLAB®e Simulink. Genera codice C/C++ per questi filtri utilizzando MATLAB Coder e Simulink Coder.
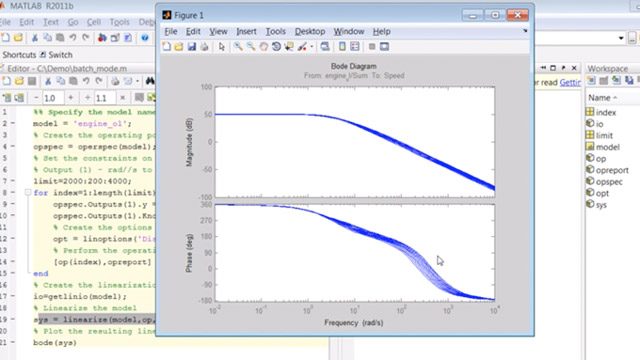
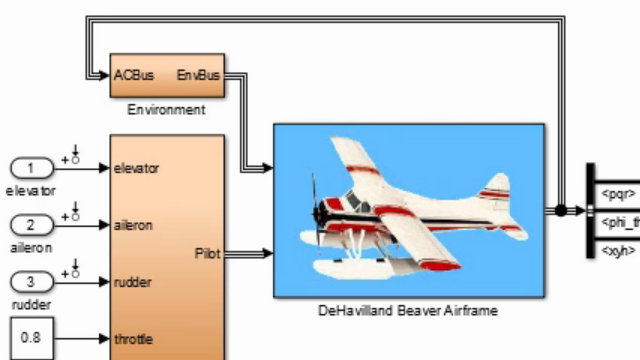
Analisi lineare
Utilizza lo strumento di analisi lineare in Simulink Control Design™ per linearizzare i modelli Simulink. Calcola le risposte di tempo e frequenza di modelli linearizzati utilizzando la risposta allo scalino e la risposta all'impulso, i diagrammi di Bode, Nichols e Nyquist, la rappresentazione del valore singolare e il diagramma poli-zeri.
progettazione di联合国补偿了
Regola graficamente i cicli di feedback SISO modellati in Simulink tramite Simulink Control Design. Progetta controller utilizzando editor grafici interattivi Nichols, Bode e luogo delle radici per aggiungere, modificare e rimuovere poli, zeri e guadagni del controller.
regolazione di联合国补偿机构
Regola automaticamente i guadagni dei controller PID modellati in Simulink. Utilizza l’app Control System Tuner o gli strumenti a riga di comando in Simulink Control Design per regolare automaticamente i guadagni e le dinamiche degli elementi di controllo distribuiti in qualsiasi numero di cicli di feedback in Simulink.
Modelli nello spazio degli stati sparsi:
Creazione,Combinazione EAnalisi di Modelli Lineari Su Larga Scala
ESEMPI.o di anello ad aggancio di fase:
regolazione dei filtri ad anello con l’approccio del loop-shaping
Attivitàdi live编辑:
esecuzione di attività di trasformazione di modelli e progettazione di controlli in modo interattivo e generazione di codice MATLAB in un live script
咨询le.note di rilascioper ulteriori informazioni su queste caratteristiche e sulle funzioni corrispondenti.
