このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
党卫军
状態空間モデル
説明
党卫军を使用して実数値の,または複素数値の状態空間モデルを作成したり,動的システムモデルを状態空間モデル形式に変換したりします。党卫军を使用して,一般化状態空間(一族)モデルや不確かさをもつ状態空間(号航空母舰(鲁棒控制工具箱))モデルを作成することもできます。
状態空間モデルは1階微分方程式で関連付けられる一連の入力,出力,および状態変数としての物理システムの数学的な表現です。状態変数は出力変数の値を定義します。党卫军モデルオブジェクトは输出またはMIMO状態空間モデルを連続時間または離散時間で表現できます。
連続時間では,状態空間モデルは次の形式をとります。
ここで,x、uおよびyはそれぞれ状態,入力および出力を表し,一个、B、CおよびDは状態空間行列です。党卫军オブジェクトは,一个、B、CおよびDを,サンプル時間,名前,入力および出力に固有の遅延などの情報と共に格納しているMATLAB®の状態空間モデルを表します。
状態と入力行列および出力行列を直接指定して,または別の種類のモデル(伝達関数モデル特遣部队など)を変換して,状態空間モデルオブジェクトを作成することができます。詳細については,状態空間モデルを参照してください。党卫军モデルオブジェクトを使用して次のことができます。
線形解析を実行する
制御設計を実行するための線形時不変(LTI)モデルを表す
他のLTIモデルと組み合わせて,より複雑なシステムを表現する
作成
構文
説明
入力引数
出力引数
プロパティ
オブジェクト関数
以下のリストには,党卫军モデルオブジェクトで使用できる関数の代表的なサブセットが含まれています。一般に,動的システムモデルに適用できるすべての関数は党卫军オブジェクトに適用できます。
例
输出状態空間モデル
次の状態空間行列で定義される输出状態空間モデルを作成します。
行列A, B, CおよびDを指定して状態空間モデルを作成します。
一个= [-1.5,2;1,0];B = (0.5; 0);C = [0, 1];D = 0;sys = ss (A, B, C, D)
(1) C (2) y (1) 0 (1) D (1) y (1) 0 (1)
離散時間状態空間モデルの作成
サンプル時間が0.25秒であり次の状態空間行列をもつ状態空間モデルを作成します。
状態空間行列を指定します。
A = [0 1;- 1];B = [0; 3);C = [0 1];D = 0;
サンプル時間を指定します。
t = 0.25;
状態空間モデルを作成します。
sys = ss (A, B, C, D, Ts);
連続時間MIMO状態空間モデル
この例では,慣性テンソルJ0.2と振幅がの減衰力Fで角を中心にして回転しているキューブについて考えます。システムへの入力は駆動トルクであり,角速度が出力です。このキューブの状態空間行列は次のようになります。
行列一个、B、CおよびDを指定して,連続時間状態空間モデルを作成します。
J = [8 -3 -3;3 8 3;3 3 8];F = 0.2 *眼(3);= - j \ F;B =发票(J);C =眼(3);D = 0;sys = ss (A, B, C, D)
sys = = (x1, x2) x3 x1 x2 -0.04545 -0.02727 -0.02727 -0.02727 -0.04545 -0.02727 x3 -0.02727 -0.02727 -0.04545 B = u1, u2 u3 x1 x2 0.2273 0.1364 0.1364 0.1364 0.2273 0.1364 x3 0.1364 0.1364 0.2273 C = (x1, x2) x3 y1 1 0 0 y2 0 1 0 y3 0 0 1 D = u1, u2 u3 y1 0 0 0 y2 0 0 0 0 0 0 3日元连续时间状态空间模型。
行列Cおよび行列Dを見ると,システムには3つの入力と3つの出力が含まれているため,sysはMIMOです。米我米O 状態空間モデルの詳細については、米姆状態空間モデルを参照してください。
離散時間MIMO状態空間モデル
次の離散時間,多入力,多出力の,サンプル時間t = 0.2秒の状態行列を使用して,状態空間モデルを作成します。
状態空間行列を指定して,離散時間MIMO状態空間モデルを作成します。
A = [7, 0, 0, -10);B = [5, 0, 0, 2];C =(1, 4, 4、0.5);D =[0 2; 2、0];t = 0.2;sys = ss (A, B, C, D, ts)
C = x1 x2 y1 1 -4 y2 -4 0.5 D = u1 u2 y1 0 -2 y2 2 0采样时间:0.2秒
状態空間モデルの状態名と入力名の指定
状態空間行列を作成し,サンプル時間を指定します。
A = [0 1;- 1];B = [0; 3);C = [0 1];D = 0;t = 0.05;
値と名前のペアを使用して状態名と入力名を指定し,状態空間モデルを作成します。
sys = ss (A, B, C, D, Ts,“StateName”,{“位置”“速度”},...“InputName”,“力”);
状態名と入力名の数は,一个、B、C,およびDの次元と一致しなければなりません。
入力と出力に名前を付けるのは,米姆システムで応答プロットを扱うときに有用である可能性があります。
步骤(系统)
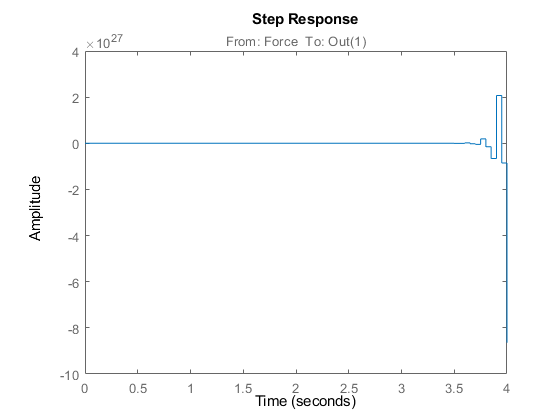
ステップ応答プロットのタイトルの入力名力に注目してください。
継承されたプロパティをもつ状態空間モデル
この例では,別の状態空間モデルから継承された,同じ时间プロパティと输入单位プロパティをもつ状態空間モデルを作成します。次の状態空間モデルについて考えます。
まず,TimeUnitプロパティおよびInputUnitプロパティが”分钟“に設定された状態空間モデルsys1を作成します。
A1 = [-1.5, 2; 1,0];B1 = (0.5; 0);C1 = [0, 1];D1 = 5;sys1 = ss (A1, B1, C1, D1,“TimeUnit”,“分钟”,“InputUnit”,“分钟”);
sys1の时间プロパティおよび输入单位プロパティが”分钟“に設定されていることを検証します。
propValues1 = [sys1.TimeUnit sys1.InputUnit]
propValues1 =1 x2单元格{“分钟”}{“分钟”}
sys1から継承されたプロパティをもつ2つ目の状態空間モデルを作成します。
A2 = [7, 1, 0, 2];B2 = (0.85; 2);C2 = (10, 14);D2 = 2;sys2 = ss (A2, B2, C2, D2, sys1);
sys2がの时间および输入单元sys1から継承されていることを検証します。
propValues2 = [sys2.TimeUnit sys2.InputUnit]
propValues2 =1 x2单元格{“分钟”}{“分钟”}
静的ゲインのMIMO状態空間モデル
この例では,静的ゲインのMIMO状態空間モデルを作成します。
2次の入力,2出力の静的ゲイン行列について考えます。
ゲイン行列を指定して静的ゲイン状態空間モデルを作成します。
D =[2、4;3、5];sys1 = ss (D)
sys1 = D = u1 u2 y1 2 4 y2 3 5静态增益。
伝達関数の状態空間モデルへの変換
以下の伝達関数の状態空間モデルを計算します。
伝達関数モデルを作成します。
H = [tf([1 1],[1 3 3 2]);Tf ([1 0 3],[1 1 1])];
このモデルを状態空間モデルに変換します。
sys = ss (H);
状態空間モデルのサイズを調べます。
大小(系统)
状态空间模型,有2个输出,1个输入,5个状态。
状態の数は,H(年代)の输出エントリの累積次数に等しくなります。
H(年代)の最小実現を得るには,次のように入力します。
sys = ss (H,“最低”);大小(系统)
状态空间模型,有2个输出,1个输入,3个状态。
結果として得られるモデルの次数は3です。これは,H(年代)を表現するために必要とされる最小の状態数です。この状態数を確認するには,H(年代)を1次系と2次系の積としてリファクタリングします。
同定されたモデルからの状態空間モデルの抽出
この例では,同定された多項式モデルの測定成分とノイズ成分を2つの別々の状態空間モデルに抽出します。
identifiedModel.matのBox-Jenkins多項式モデルltiSysを読み込みます。
负载(“identifiedModel.mat”,“ltiSys”);
ltiSysは同定された
形式の離散時間モデルで,
は測定成分,
はノイズ成分を表します。
測定成分とノイズ成分を状態空間モデルとして抽出します。
sysMeas = ss (ltiSys,“测量”)
sysMeas = A = x1 x2 x1 1.575 -0.6115 x2 1 0 B = u1 x1 x1 0.5 x2 0 C = x1 x2 y1 -0.2851 0.3916 D = u1 y1 0输入延迟(采样周期):2采样时间:0.04秒
结合sysNoise = ss (ltiSys,“噪音”)
结合sysNoise = = (x1, x2) x3 x1 1.026 -0.26 0.3899 1 x2 0 0 x3 0.5 0 0 B = 0.25 v@y1 x1 x2 0 x3 0 x1 C = x3日元0.319 -0.04738 0.07106 0.04556 D = v@y1 y1输入组:名字通道噪声1样品时间:0.04秒离散时间状态空间模型。
測定成分はプラントモデルとすることができ,ノイズ成分は制御システム設計の外乱モデルとして使用できます。
記述子状態空間モデルの明示的な実現
記述子状態空間モデル(E≠我)を作成します。
A = [2 -4;4 2];b = [1;0.5);C = [-0.5, -2];d = [1];E = [10 0;3 0.5);sysd = dss (a, b, c, d, e);
システムの明示的な実現(E=我)を計算します。
syse = ss (sysd,“明确”)
A = x1 x2 x1 2 -4 x2 20 -20 B = u1 x1 -1 x2 -5 C = x1 x2 y1 -0.5 -2 D = u1 y1 -1连续时间状态空间模型。
記述子と明示的な実現には等価なダイナミクスがあることを確認します。
bodeplot (sysd syse,“g——”)

固定パラメーターと調整可能なパラメーターの両方をもつ状態空間モデルの作成
この例では,固定パラメーターと調整可能なパラメーターの両方をもつ状態空間一族モデルを作成する方法を説明します。
ここで,一个とbは初期値がそれぞれ-1と3.の調整可能なパラメーターです。
realpを使用して調整可能なパラメーターを作成します。
一个= realp (“一个”1);b = realp (“b”3);
一个とbの代数式を使って一般化行列を定義します。
A = [1 A +b;0 A *b];
一个は,块プロパティに一个とbを含む一般化行列です。一个とbの初期値から,一个の初期値は(1 2; 0 3)です。
固定値状態空間行列を作成します。
B = [-3.0, 1.5];C = [0.3 0];D = 0;
党卫军を使用して状態空間モデルを作成します。
sys = ss (A, B, C, D)
sys =广义连续时间状态空间模型,具有1个输出、1个输入、2个状态和以下块:a:标量参数,2次出现。b:标量参数,2次。输入“ss(sys)”查看当前值,输入“get(sys)”查看所有属性,输入“sys. sys”查看当前值。与积木互动。
sysは,調整可能なパラメーター一个およびbを含む一般化LTIモデル(一族)です。
入力遅延と出力遅延をもつ状態空間モデル
この例では,次の状態空間行列で定義された输出状態空間モデルについて考えます。
0.5秒の入力遅延と2.5秒の出力遅延を考慮し,行列A, B, CおよびDを表す状態空間モデルオブジェクトを作成します。
一个= [-1.5,2;1,0];B = (0.5; 0);C = [0, 1];D = 0;sys = ss (A, B, C, D,“InputDelay”, 0.5,“OutputDelay”, 2.5)
sys = A = x1 x2 x1 -1.5 -2 x2 1 0 B = u1 x1 x1 0.5 x2 0 C = x1 x2 y1 0 1 D = u1 y1 0输入延迟(秒):0.5输出延迟(秒):2.5连续时间状态空间模型。
得到コマンドを使用してMATLABオブジェクトのすべてのプロパティを表示することもできます。
(系统)
[2 x2双]B: [2 x1双]C: [0 1] D: 0 E:[]扩展:0 StateName: {2 x1细胞}StatePath: {2 x1细胞}StateUnit: {2 x1细胞}InternalDelay: [0 x1双]InputDelay: 0.5000 OutputDelay: 2.5000 Ts: 0 TimeUnit:“秒”InputName: {"} InputUnit: {"} InputGroup: [1 x1 struct] OutputName: {"} OutputUnit: {"} OutputGroup: [1 x1 struct]指出:[0x1 string] UserData: [] Name: " SamplingGrid: [1x1 struct] "
LTIモデルのむだ時間の指定の詳細については,むだ時間の指定を参照してください。
状態空間システムの安定性解析
この例では,次の状態行列を表す状態空間システムオブジェクトについて考えます。
党卫军コマンドを使用して状態空間オブジェクトsysを作成します。
= (-1.2, -1.6, 0; 1, 0, 0, 0, 1, 0];B = (1, 0, 0);C =(0、0.5、1.3);D = 0;sys = ss (A, B, C, D);
次に,負の単位ゲインについて閉ループ状態空間モデルオブジェクトを計算し,閉ループ状態空間システムオブジェクトsysFeedbackを見つけます。
sysFeedback =反馈(sys, 1);P =杆(sysFeedback)
P =3×1复杂-0.2305 - 1.3062i -0.7389 + 0.00000 i
単位ゲインのフィードバックループは,すべての極が負の実数部をもつため安定しています。閉ループの極を確認すると,安定性を2進数で評価できます。業務上は,安定性が堅牢(または脆弱)であるかがわかると非常に役に立ちます。堅牢性を示すものとして,安定性が失われる前の,ループゲインの変化の度合いがあります。根軌跡プロットを使用すると,ループが安定しているk値の範囲を推定できます。
rlocus(系统)

ループゲインの変化は堅牢な安定性を示す1つの要素にすぎません。一般的に,不完全なプラントのモデル化は,ゲインと位相の両方が正確にわかっていないことを意味します。モデル化誤差はゲインの交差周波数(開ループゲインが0分贝の周波数)付近で最も悪影響を及ぼすため,この周波数でどの程度の位相の変化を許容できるかも問題になります。
ゲイン余裕と位相余裕は,以下のようにボード線図に表示できます。
波德(sys)网格
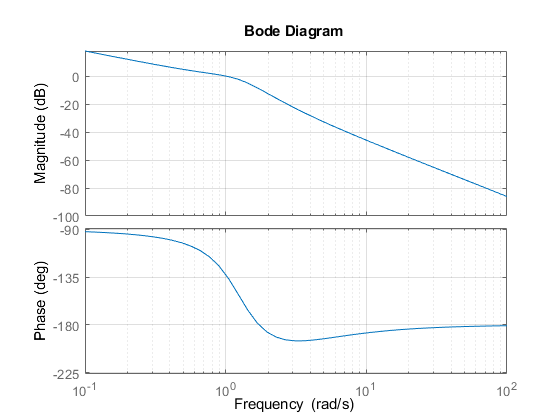
より詳細な例については,ゲインと位相余裕の評価を参照してください。
状態空間モデルを使用した制御設計
この例では,次の行列で表されるシステムについて,0.75 rad / sのターゲット帯域幅をもつ二自由度PIDコントローラーを設計します。
党卫军コマンドを使用して状態空間オブジェクトsysを作成します。
一个= (-0.5,-0.1,1,0);B = (1, 0);C = [0, 1];D = 0;sys = ss (A, B, C, D)
(1) C (1) y (1) 0 (1) D (1) y (1) 0 (1)
ターゲット帯域幅を使用し,pidtuneを使用して二自由度コントローラーを生成します。
wc = 0.75;C2 = pidtune (sys,“PID2”wc)
C2 = 1 u = Kp (b*r-y) + Ki——(r-y) + Kd*s (c*r-y) s,具有Kp = 0.513, Ki = 0.0975, Kd = 0.577, b = 0.344, c = 0并联形式的连续二自由度PID控制器。
タイプ“PID2”を使用すると,pidtuneにより二自由度コントローラーが生成され,pid2オブジェクトとして表現されます。表示によりこの結果を確認します。表示にはまた,pidtuneがすべてのコントローラー係数を,設定点の重みbおよびcを含めて調整し,性能とロバスト性のバランスを取っていることも示されます。
ライブエディターによる対話型のPID調整については,PIDコントローラーの調整ライブエディタータスクを参照してください。このタスクを使用すると,PIDコントローラーを対話的に設計し,ライブスクリプト用のMATLABコードを自動的に生成できます。
スタンドアロンアプリによる対話型のPID調整には,PID調整器を使用します。アプリを使用したコントローラーの設計の例については、高速設定値追従用のPIDコントローラーの設計を参照してください。
フィードバックループ内の状態空間モデルの特定の入出力の接続
5つの入力と4つの出力をもつ状態空間プラントG3,およびつの入力と2つの出力をもつ状態空間フィードバックコントローラーKを考えてみましょう。プラントGの出力1、3、4をコントローラーKの入力に接続し,コントローラー出力をプラントの入力4と2に接続しなければなりません。

この例では,次の一連の行列によって表されるGおよびKの両方についての2つの連続時間状態空間モデルについて考えます。
AG) = [3, 0.4, 0.3, -0.5, -2.8, -0.8, 0.2, 0.8, 3];BG = [0.4, 0, 0.3, 0.2, 0; -0.2,, 0.1, -0.9, -0.5, 0.6, 0.9, 0.5, 0.2, 0];CG =[0、-0.1、1;0,-0.2,1.6,-0.7,1.5,1.2,-1.4,-0.2,0];DG = [0, 0, 0, 0, 1, 0, 0.4, -0.7, 0, 0.9, 0, 0.3, 0, 0, 0, 0.2, 0, 0, 0, 0);sysG = ss (AG)、BG、CG DG)
sysG = 0.3 = 0.4 (x1, x2) x3 x1 3 x2 -0.5 -2.8 -0.8 x3 0.2 - 0.8 3 B = u1, u2 u3 u4 u5 x1 0.4 0 1 0.1 -0.9 -0.5 -0.2 0.3 - 0.2 0 x2 x3 0.6 0.9 0.5 0.2 0 C = -0.1 (x1, x2) x3 y1 0 1 y2 0 -0.2 1.6 y3日元-0.7 1.5 1.2 -1.4 -0.2 0 D = u1, u2 u3 u4 u5 y1 0 0 0 0 1 y2 0 0.3 0.4 - -0.7 0.9 y3 0 0 0 0 y4 0.2 0 0 0 0连续时间状态空间模型。
正义与发展党= (-0.2,2.1,0.7,-2.2,-0.1,-2.2,-0.4,2.3,-0.2);BK = (-0.1, -2.1, -0.3, -0.1, 0, 0.6; 1, 0, 0.8);CK = [1, 0, 0, -0.4, -0.2, 0.3);DK = [0, 0, 0, 0, 0, -1.2);sysK = ss (AK, BK, CK, DK)
sysK = = (x1, x2) x3 x1 x2 -0.2 2.1 0.7 -2.2 -0.1 -2.2 x3 -0.4 2.3 -0.2 B = u1, u2 u3 x1 0.6 -0.1 -0.1 -2.1 -0.3 x2 0 x3 1 0 x1 0.8 C = x3 y1 1 0 0 y2 -0.4 -0.2 0.3 D = u1, u2 u3 y1 0 0 0 y2 0 0 -1.2连续时间状态空间模型。
フィードバックループで接続される入力と出力に基づいてfeedoutおよびfeedinベクトルを定義します。
Feedin = [4 2];Feedout = [1 3 4];sys =反馈(sysG sysK、feedin feedout, 1)
sys = = (x1, x2) x3 x4 x5 x6 x1 3 0 0 x2 1.18 -2.56 -0.8 0.4 0.3 0.2 -1.3 -1.312 - 0.584 -0.2 - 0.3 x3 3 x4 -0.27 0.56 - 0.18 2.948 -2.929 -2.42 -2.2 -0.84 -0.11 0.1 -2.2 -0.1 -0.452 1.974 0.889 x5 x6 1 -1.12 -0.26 -0.4 2.3 -0.2 B = u1, u2 u3 u4 u5 x1 0.4 0 1 0.1 -0.9 -0.5 -0.44 0.3 - 0.2 0 x2 x3 0.816 0.9 0.5 0.2 0 x4 -0.2112 - -0.63 0 0 0.1 x5 0.12 0 0 00.1x60.16000 -1 C = x1 x2 x3 x4 x5 x6 y1 0 -0.1 -1 0 0 0 y2 -0.672 -0.296 1.6 0.16 0.08 -0.12 y3 -1.204 1.428 1.2 0.12 0.06 -0.09 y4 -1.4 -0.2 0 0 0 0 D = u1 u2 u3 u4 u5 y1 0 0 0 0 -1 y2 0.096 0.4 -0.7 0 0.9 y3 0.072 0.3 0 0 0 y4 0.2 0 0 0 0 Continuous-time state-space model.
大小(系统)
有4个输出,5个输入,6个状态的状态空间模型。
sysは,GとKの指定された入力と出力を接続して取得される結果の閉ループ状態空間モデルです。
参考
你也可以从以下列表中选择一个网站:
