由三角形组成的
ステレオステレオイメージでのの歪み歪み后后のマッチするするの3次元次元
构文
说明
世界观点=三角形(matchedPoints1那matchedPoints2那斯特雷托姆的)
世界观点=三角形(matchedPoints1那matchedPoints2那Cameramatrix1.那Cameramatrix2.的)
[。世界观点那重新评论错误那validIndex.] =三角形(___的)
例
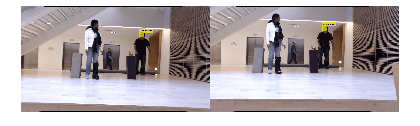
ステレオカメラから顔までの距離の測定
ステレオパラメーターを読み込みます。
加载('webcamsscenereconstruction.mat');
イメージのステレオペアを読み取ります。
i1 = imread('scenereconstrigchtleft.jpg');i2 = imread('scenereconstruction.jpg');
イメージの歪みを補正します。
I1 =未替换显图像(I1,Stereoparams.Cameraparameters1);I2 = untostortimage(I2,Stereoparams.cameraparameters2);
両方のイメージ内でをを検出します。
FaceDetector = Vision.cascadeObjectDetector;Face1 = Faceedetector(I1);Face2 = Faceedetector(I2);
顔の中心を求めます。
Center1 = face1(1:2) + face1(3:4)/2;Center2 = face2(1:2) + face2(3:4)/2;
カメラ1から顔までの距離を計算します。
point3d =三角形(Center1,Center2,Stereoparams);Textinginmeters = Norm(Point3D)/ 1000;
検出検出した颜颜とを表示しし
distanceasstring = sprintf('%0.2F米', distanceInMeters);I1 = insertObjectAnnotation (I1,'长方形'face1 distanceAsString,'字体大小',18);i2 = InsertObjectAnnotation(I2,'长方形',面部2,distanceastring,'字体大小',18);i1 = insertshape(i1,'citntrectangle', face1);I2 = insertShape (I2,'citntrectangle',面部2);imshowpair(i1,i2,'剪辑');
入力数
matchedPoints1-イメージ1の点の座标
M行2列の行列|Surfpoints.オブジェクト|MSERREGIONSオブジェクト|cornerPointsオブジェクト|Brikspoints.オブジェクト
イメージ1の点の座标.m个个[x y]座标のm行2列の行列,またはKAZEPointsオブジェクトSurfpoints.オブジェクトMSERREGIONSオブジェクトcornerPointsオブジェクトBrikspoints.オブジェクトとして指定します。matchedPoints1入力とmatchedPoints2入力には,matchfeatures.などの关数を使用してマッチする点が含まれていなければなりません。
matchedPoints2-イメージ2の点の座标
M行2列の行列|Surfpoints.オブジェクト|MSERREGIONSオブジェクト|cornerPointsオブジェクト|Brikspoints.オブジェクト
イメージ2の点の座标.m个の[x y]座标のm行2列の行,またはKAZEPointsオブジェクトSurfpoints.オブジェクトMSERREGIONSオブジェクトcornerPointsオブジェクトBrikspoints.オブジェクトとして指定します。matchedPoints1入力とmatchedPoints2入力には,matchfeatures.などの关数を使用してマッチする点が含まれていなければなりません。

Cameramatrix1.-カメラ1の射影行列
4行3列の行列
カメラ1の射影行列。4行3列の行列として指定します。この行列は、同次座標の 3 次元点をカメラからのイメージの対応する点にマッピングします。この入力は、ワールド座標系のカメラ 1 の位置と向きを示します。Cameramatrix1.は,実数および非スパース数目列でなければなりんませカメラ行。Cameramatrix.を使用して取得できます。

关节にれるカメラ,ワールド座标系を定义し。
Cameramatrix2.-カメラ2の射影行列
4行3列列の行程
カメラ2の射影行列。4行3列の行列として指定します。この行列は、同次座標の 3 次元点をカメラからのイメージの対応する点にマッピングします。この入力は、ワールド座標系のカメラ 2 の位置と向きを示します。Cameramatrix2.は,実数および非スパース数目列でなければなりんませカメラ行。Cameramatrix.を使用して取得できます。

关节にれるカメラ,ワールド座标系を定义し。
出力数
世界观点- 歪み补正后后のイメージ点のマッチするペアのの次元
“M行3列”の行列
歪み補正後のイメージ点のマッチするペアの 3 次元位置。M 行 3 列の行列として返されます。この行列には、2 つのステレオ イメージからの歪み補正後のマッチするイメージ点のペアの [x y z] 位置が M 個含まれます。
斯特雷托姆
Cameramatrix1.とCameramatrix2.を使用してカメラのジオメトリを指定すると,ワールド座标点の座标がカメラ行列によって定义されます。
matchedPoints1とmatchedPoints2のデータ型が双倍的の場合,関数は世界观点をデータ型双倍的として返します。それ以外の場合は世界观点をデータ型单身的として返します。
データ型:单身的|双倍的
重新评论错误- 再投影误差
m行1列のベクトル
再投影误差.m行1列のベクトルとして返され。关键は,各ワールド座标点をのイメージににしますその后,各イメージ検出され点と再投影され点点ととして,再投影误差を计算ますします。重新评论错误ベクトルには,各ワールド座標点の平均再投影誤差が含まれます。

validIndex.- ワールド座标点の有效性
m行1列の逻辑ベクトル
ワールド座标点の有效.M行1列の逻辑ベクトルとして返されます.Logical1(真正的)として示される有象な点,カメラの前に配置されます.Logical0.(错误的)。
カメラの位置に关键词ワールド座の有象性,カメラ行列と同次ををしてにワールド座标点投影することによって决定され。です。
ヒント
关节有关部由三角形组成的ではレンズ歪みが考虑されませんませんませんの検出にに关联undostimage.を使用して,イメージの歪みを補正できます。あるいは,関数undostortpoints.を使用して点自体の歪みを补正できます。
参照
哈特利,R.和A.齐瑟曼。计算机视觉中的多视图几何。剑桥大学出版社,第312页,2003。
拡張機能
参考
アプリ
关节有关部
オブジェクト
您还可以从以下列表中选择一个网站:
