主要内容
このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
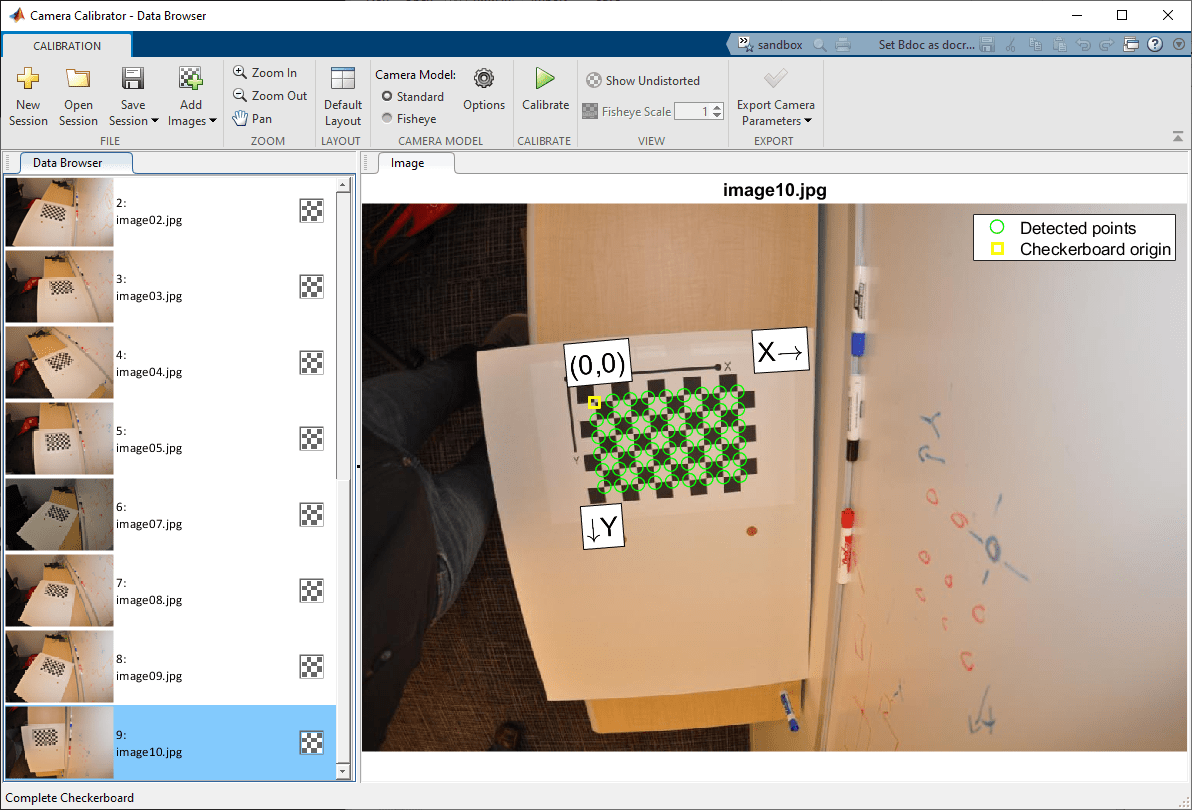
カメラキャリブレーター
単一カメラの幾何学的パラメーターの推定
説明
カメラキャリブレーターアプリケーションによって,カメラの内部,外部およびレンズ歪みのパラメーターを推定できます。これらのカメラパラメーターはさまざまなコンピュータービジョンアプリケーションに使用できます。これらのアプリケーションは,イメージからレンズ歪みの影響を除去する,平面オブジェクトを測定する,複数のカメラからの3次元シーンを再構成するなどを行います。
カメラキャリブレーターアプリを開く
MATLAB®ツールストリップ:[アプリ]タブで,[イメージ処理とコンピュータービジョン]の下にあるアプリアイコンをクリックします。
MATLABコマンドプロンプト:
cameraCalibratorと入力します。
例
関連する例
プログラムによる使用
参考
アプリ
クラス
関数
R2013bで導入
你也可以从以下列表中选择一个网站:
