このページの翻訳は最新ではありません。ここをクリックして,英語の最新版を参照してください。
ステレオカメラキャリブレーターアプリ
ステレオカメラキャリブレーターの概要
ステレオカメラキャリブレーターアプリを使用してステレオ カメラのキャリブレーションを行います。キャリブレーション済みのカメラはイメージの深度の復元に使用できます。ステレオ システムはカメラ 1.とカメラ 2.の 2.台のカメラで構成されます。このアプリは、各カメラのパラメーターを推定することも、インポートすることもできます。また、カメラ 1.を基準としたカメラ 2.の相対的な位置と方向も計算します。
ステレオカメラキャリブレーターアプリは,ステレオカメラのパラメーターを含むオブジェクトを作成します。このオブジェクトを以下のことを行うために使用できます。
関数
整流成像を使用してステレオイメージを平行化する。関数
reconstructSceneを使用して3次元シーンを再構成する。関数
三角测量を使用して,イメージ点のマッチするペアに対応する3次元での位置を計算する。
ステレオカメラキャリブレーターアプリで使用される一連のキャリブレーション関数により,ステレオシステムキャリブレーションのワークフローが提供されます。これらの関数はMATLAB®ワークスペースで直接使用できます。キャリブレーション関数のリストについては、単一カメラとステレオカメラのキャリブレーションを参照してください。
メモ
カメラキャリブレーターアプリは95度の視野(FOV)までカメラと一緒に使用することができます。
ステレオカメラのキャリブレーション

アプリを使用してステレオカメラのキャリブレーションを行うには,次のワークフローに従います。
イメージ,カメラおよびキャリブレーションパターンを準備します。
イメージのペアを追加します。
ステレオカメラのキャリブレーションを行います。
キャリブレーションの精度を評価します。
必要な場合,パラメーターを調整して精度を高めます。
パラメーターオブジェクトをエクスポートします。
既定の値で問題なく機能する場合には,パラメーターをエクスポートする前に調整を加える必要はありません。カメラキャリブレーション関数をMATLABワークスペースで直接使用して改善させることもできます。関数の一覧は,単一カメラとステレオカメラのキャリブレーションを参照してください。
ステレオカメラキャリブレーターを開く
MATLABツールストリップ:[アプリ]タブの[イメージ処理とコンピュータービジョン]セクションで,[ステレオカメラキャリブレーター]アイコンをクリックします。
MATLABコマンドプロンプト:
stereoCameraCalibratorと入力します
パターン,カメラおよびイメージの準備
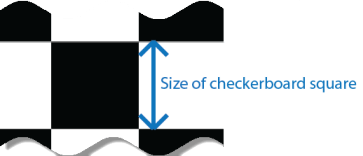
結果を改善するには,キャリブレーションパターンの10 ~ 20枚のイメージを使用してください。カメラキャリブレーターでは少なくとも3枚のイメージが必要です。圧縮なしのイメージかPNGなどの可逆圧縮形式を使用してください。キャリブレーションパターンとカメラの設定は、キャリブレーターと連携させるために一連の条件を満たしていなければなりません。キャリブレーションの精度を高めるには、次の手順に従ってパターンの準備、カメラの設定およびイメージの取得を行います。


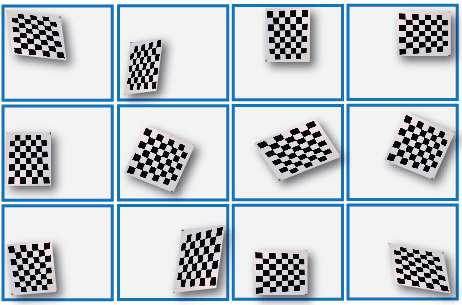

イメージのペアの追加
キャリブレーションを開始するには,をクリックして,具体的にはチェッカーボードのステレオイメージを2セット(各カメラから1セットずつ)クリックします。




キャリブレーション
取り込まれたイメージペアに問題がなければ,[キャリブレーション]タブで[キャリブレーション]ボタンをクリックします。既定のキャリブレーション設定では,カメラパラメーターの最小のセットが仮定されます。最初は既定の設定を使用してキャリブレーションを実行してください。その結果を評価し,設定の調整およびイメージの追加または削除を行うことでキャリブレーションの精度を改善してから,再度キャリブレーションを実行します。
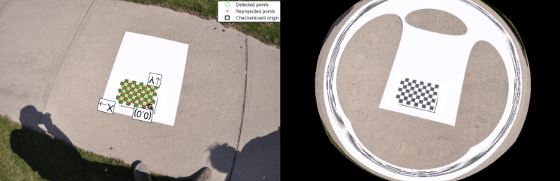
キャリブレーション結果の評価
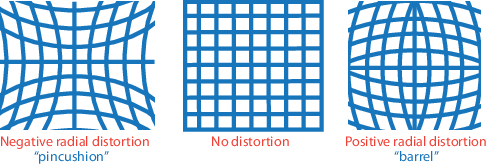
キャリブレーションの精度を評価する方法には,再投影誤差の確認,カメラの外部パラメーターの確認または歪み補正されたイメージの表示があります。最良のキャリブレーション結果を得るには,3つすべての評価方法を使用してください。





キャリブレーションの改善
キャリブレーションを改善するには,誤差の大きいイメージペアを削除するか,さらにイメージペアを追加するか,キャリブレーターの設定を修正します。
カメラ パラメーターのエクスポート
キャリブレーションで満足できる精度が得られたら,[カメラ パラメーターのエクスポート]をクリックします。[カメラ パラメーターのエクスポート]を選択するか,カメラパラメーターをMATLABスクリプトとして生成するために,カメラパラメーターをオブジェクトに保存またはエクスポートできます。
参照
[1] Zhang,Z.“摄像机校准的灵活新技术”,《模式分析和机器智能IEEE学报》,第22卷,第11期,2000年,第1330-1334页。
Heikkila, J, and O. Silven。带有隐式图像校正的四步摄像机校准程序。计算机视觉与模式识别国际会议。1997。
参考
cameraParameters|detectCheckerboardPoints|estimateCameraParameters|generateCheckerboardPoints|showExtrinsics|showReprojectionErrors|stereoParameters|undistortImage|カメラキャリブレーター|ステレオカメラキャリブレーター
関連する例
- 単一カメラのキャリブレーションの精度の評価
- キャリブレートされたカメラによる平面オブジェクトの測定
- 2つのビューからの结构与运动
- 複数のビューからの结构与运动
- ステレオ ビデオからの深度推定
- 3次元点群のレジストレーションと繋ぎ合わせ
- キャリブレーションされていないステレオイメージの平行化
- チェッカーボードパターン
詳細
外部のWebサイト
你也可以从以下列表中选择一个网站:
