。
単一カメラキャリブレーターアプリ
カメラキャリブレーターの概要
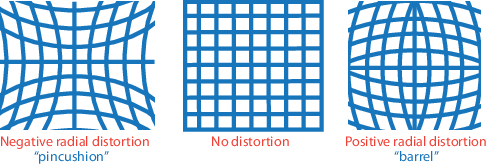
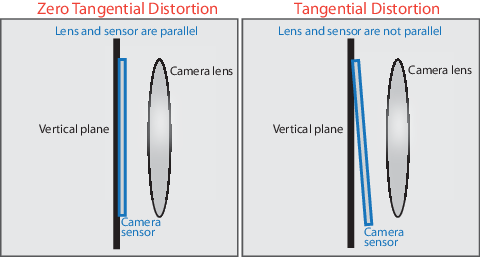
カメラキャリブレーターアプリを使用してカメラの内部,外部およびレンズ歪みのパラメーターを推定できます。これらのカメラパラメーターはさまざまなコンピュータービジョンアプリケーションに使用できます。これらのアプリケーションは,イメージからレンズ歪みの影响を除去する,平台オブジェクトをする,复数のカメラのの3次元シーンを再构するなど行。
カメラキャリブレーターこれらキャリブレーションのワークが提供れますますされれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれれ®ワークスペースで直接使使使用できでき。关键词一定は,単一カメラとステレオカメラのキャリブレーションを参照してください。
単一カメラのキャリブレーション

アプリの使用ししカメラキャリブレーションををににには,次のワークフローに従い。
イメージ,カメラおよびキャリブレーションパターンを準備します。
イメージを追加して,标准のカメラモデルまたは鱼眼モデルモデル选択し。
カメラのキャリブレーションを行。
キャリブレーションの精度评価します。
必要な場合,パラメーターを調整して精度を高めます。
パラメーターオブジェクトをエクスポートします。
既定既定の値で问题なくするするエクスポートする前に调整加载必要はませんカメラカメラ关键をありんワークワークスペーススペースで使使スペーススペーススペースできますてスペーススペースこともます。关键词改善さこともでき。关键词一般来说。単一カメラとステレオカメラのキャリブレーションを参照してください。
カメラキャリブレーターを開く
MATLABツールストリップ:[アプリ]タブの[イメージ致理性とコンピュータービジョン]セクションで,[カメラキャリブレーター]アイコンをクリックします。
matlabコマンドコマンド:
cameraCalibratorとと力します
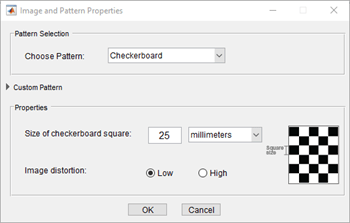
パターン,カメラおよびイメージの设备
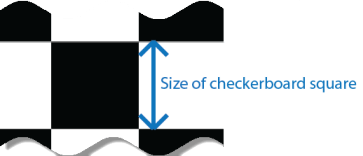
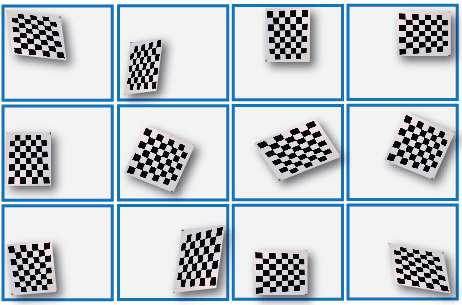
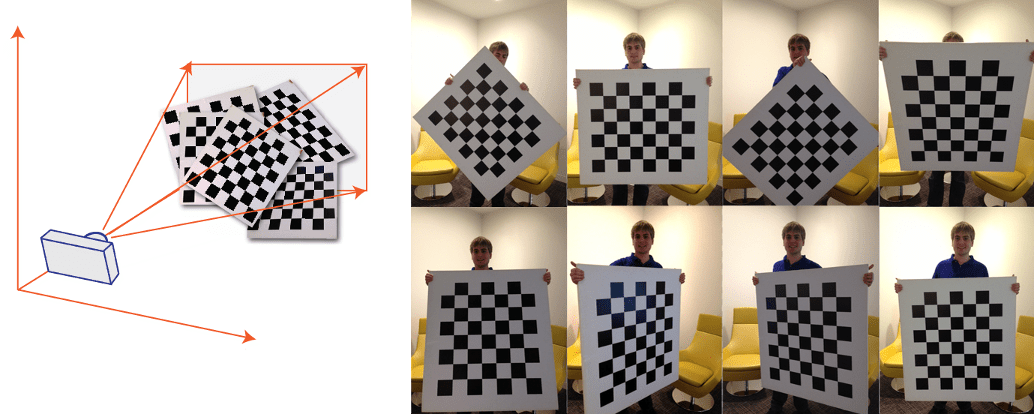
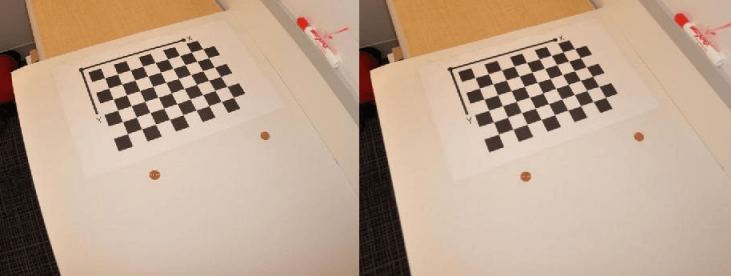
より良い结果を得るに,キャリブレーションパターンの10〜20枚のイメージを使くださいください。カメラキャリブレーターで少なくとも3枚のイメージが必要です。圧缩圧缩なしのイメージかか必要必要などの可逆圧缩かをを使用およびおよびイメージの取得をいい
メモ
异なるキャリブレーターアプリはチェッカーパターンのみをサポートします。异なるタイプのキャリブレーションパターンを使使しいるパターンでももているでで,关联估计估计をを使うとカメラのキャリブレーションをうことができことができことができうのパターンををを使を使ははははははののはありありありはははははははははははははははははははははははははははははははははははははははははははううはううははうはははううううはううう


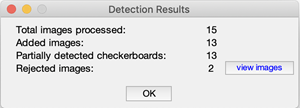
イメージイメージ加加とカメラのの选択
キャリブレーションを开放するには,イメージイメージ追加しなけれなりませんんんん。フォルダーから保存済みイメージを追たり,カメラから直接をキャリブレーターするます。キャリブレーターキャリブレーター,イメージをしてキャリブレーター次に,キャリブレーターは,チェッカーボードの点検出します検出検出します検出検出ししのししの検出上検出し次を検出しし検出を検出し

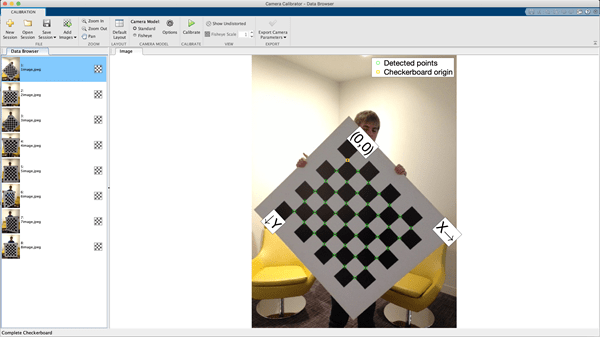
キャリブレーション
取り込まれたイメージに問題がなければ,[キャリブレーション]タブで[キャリブレーション]ボタンをクリックします,カメラのの小のセット仮定されますますますて既定设定を使てキャリブレーションを実してください结果をしし。およびイメージの追加または削除を行ことでの精灵を改善てて,再度キャリブレーションを実します标准のカメラモデル鱼眼鱼眼カメラ切り替える场切り替える鱼眼场切り替える场场场场実実ません。
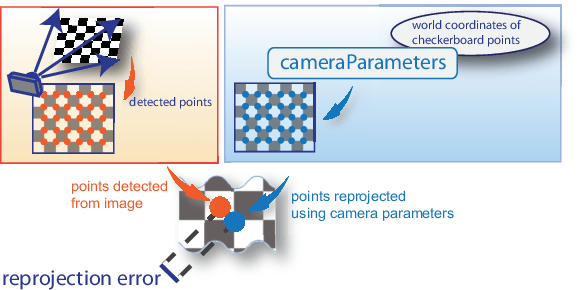
キャリブレーション結果の評価
キャリブレーションの精度を评価する方法には,再投影误差の确认,カメラの外部パラメーターの确认または歪み补正されたイメージの表示があります。最良のキャリブレーション结果を得るには,3つすべての评価方法を实用しください。





キャリブレーションの改善
キャリブレーションを改善するには,誤差の大きいイメージを削除するか,さらにイメージを追加するか,キャリブレーターの設定を修正します。
カメラパラメーターのエクスポート
キャリブレーションで満足できる精密ががられたら,[カメラパラメーターのエクスポート]をクリックします。[カメラパラメーターのエクスポート]を選択するか,カメラパラメーターをMATLABスクリプトとして生成するために,カメラパラメーターをオブジェクトに保存またはエクスポートできます。
参照
[1] Zhang, Z. " A Flexible New Technique for Camera Calibration. "模式分析与机器智能学报。第22卷第11期,2000年,1330-1334页。
[2] Heikkila,J.和O. Silven。“具有隐式图像校正的四步相机校准程序。”IEEE计算机愿景和模式识别国际会议。1997年。
[3] Scaramuzza,D.,A.Martinelli和R. Siegwart。“一个工具箱,便于校准Omindirectional相机。”IEEE智能机器人与系统国际会议的诉讼程序(IROS 2006)。北京,中国,2006年10月7日至15日。
Urban, S. Leitloff, S. Hinz。“改进的广角,鱼眼和全方位摄像机校准。”摄影测量与去除传感杂志。《自然》,2015年第1期,第72 - 79页。
参考
cameraParameters|detectCheckerboardPoints|估计估计|generatecheckerboardpoint|showextrinsics.|showReprojectionErrors|stereoParameters|undistortImage|カメラキャリブレーター|ステレオカメラキャリブレーター
关键词例
- 単一カメラのキャリブレーションの精密の评価
- キャリブレートされたカメラによる平等オブジェクトの测定
- 2つのビューからの结构与运动
- 来自运动的结构
- ステレオビデオからの深度推定
- 3次元点群のレジストレーションと系ぎ合并
- キャリブレーションされていないステレオイメージの平行化
- チェッカーボードパターン
詳細
外部の网サイト
您还可以从以下列表中选择一个网站:
