无人机的工具箱
无人机アプリケーションの設計,シミュレーション,展開
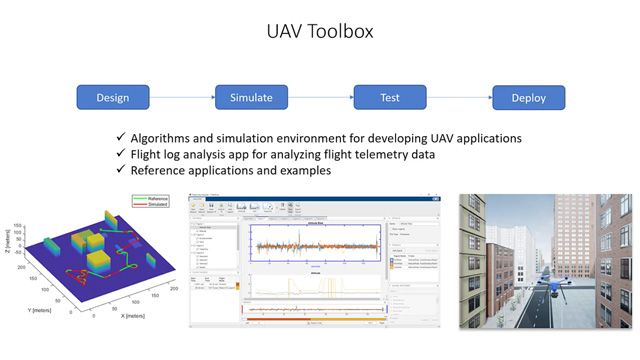
无人机工具箱には,無人航空機(UAV)やドローンアプリケーションの設計,シミュレーション,テスト,展開を行うためのツールやリファレンスアプリケーションが用意されています。自律飛行アルゴリズムや无人机ミッション,フライトコントローラーを設計できます。飞行Log Analyzerアプリでは、一般的なフライトログ形式から 3D 飛行経路、テレメトリ情報、センサーの読み取り値を対話的に解析できます。
デスクトップシミュレーションや,自律飛行アルゴリズムとフライトコントローラーのハードウェアインザループ(边境)テストでは,无人机シナリオを生成してシミュレーションできます。カメラ、激光雷达、IMU, GPSセンサーの出力をフォトリアリスティックな3 d環境または2.5 dのシミュレーション環境でシミュレートすることができます。
无人机工具箱には,无人机の一般的な用途向けにリファレンスアプリケーション例(マルチローター无人机を使った自律型ドローンによる配送など)が用意されています。このツールボックスでは,ラピッドプロトタイピングや边境テスト,Pixhawk®自动驾驶仪などのハードウェアへのスタンドアロン展開用のC / c++コード生成をサポートしています(嵌入式编码器®を使用)。
詳細を見る:
カスタマイズ可能なリファレンスアプリケーションを使用して,无人机アプリケーションの設計を開始します。

センサーの読み取り値を使用した,无人机配送のシミュレーション。
直方体无人机シミュレーション
直方体ベースのシミュレーション用に无人机シナリオを作成し,GPSやINS,激光雷达センサーからの読み取り値をシミュレートしながら自律飛行アルゴリズムをテストします。
虚幻引擎无人机シミュレーション
高忠実度カメラと激光雷达センサーのデータを生成しながら,史诗般的游戏®の虚幻引擎®を使用してレンダリングされた3 dシミュレーション環境で,无人机の自律飛行アルゴリズムの開発,テスト,可視化を行います。
飞行Log Analyzerアプリ
TLOGやULOG,カスタムファイル形式のログファイルをインポートし,そのインポートしたデータをカスタマイズ可能なプロットで対話的に可視化して解析します。
可視化と再生
事前定義済みのカスタマイズ可能なプロットを使用して,テレメトリログデータを同期して可視化します。

テレメトリログデータから生成されたプロット。
诱导と制御
閉ループ自動操縦コントローラーを近似した低次元誘導モデルを使用して,固定翼またはマルチローターの无人机をシミュレートします。

指导模型ブロックを使用して,固定翼またはマルチローターの无人机を低次元の誘導モデルとして表現。
无人机ミッション
ウェイポイント追従,軌道追従,カスタマイズ可能な経路計画アルゴリズムを使用して,自律型无人机ミッションの計画とシミュレーションを行います。
MAVLink接続
无人机ハードウェアとの接続によるメッセージの交換や,微型飞行器链接(MAVLink)通信プロトコルによるトピック,接続,クライアントのリストの検査を行います。

MAVLinkプロトコルを使用した无人机ハードウェアとの通信と,无人机パラメーターの調整。
PX4蒙
无人机工具箱支持包的PX金宝app4自动驾驶を使用してPX4®ホストターゲットでのシミュレーション中にPixhawk Autopililotの周辺機器にアクセスします。嵌入式编码器を使用して、飛行制御アルゴリズムを構築し、Pixhawk Autopilots に展開します。

飛行制御アルゴリズムを設計し,Pixhawk蒙に展開