机器人操作器算法设计
本次提交包含MATLAB和Simulink Robotics Arena视频中使用的所有文件,“设计机器人机械手算法”和“控制金宝app机器人机械手关节”。
这些文件包括:
-一个MATLAB脚本,演示如何实现机器人机械手的逆运动学算法
-利金宝app用配置空间和任务空间控制器的机器人机械臂力矩控制的Simulink模型
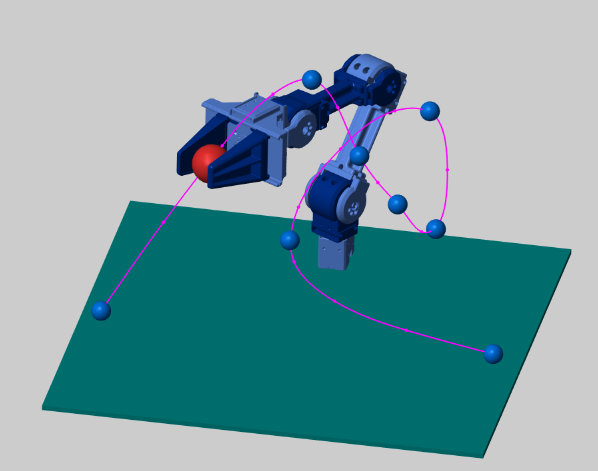
- 金宝appSimulink模型的一个机械臂,使用导出的逆运动学算法来拾取物体并跟随轨迹
-利金宝app用逆运动学捕捉空中物体的机械臂Simulink模型,演示了可能的下一步步骤和感知算法的集成
运行脚本和模型所需的所有文件,包括CAD文件和URDF文件,要么包含在提交中,要么使用提供的启动脚本下载。必须安装命令行Git才能自动下载机器人描述文件。
为了方便起见,Simscape多体多物理库和Simscape多体接触力库的本地副本已包括在本提交文件中。如果你想安装这些库的最新版本,你可以在下面找到它们:
* Simscape Multibody Multiphysics Library://www.tatmou.com/matlabcentral/fileexchange/37636-simscape-multibody-multiphysics-library
Simscape多体接触力库://www.tatmou.com/matlabcentral/fileexchange/47417-simscape-multibody-contact-forces-library
引用作为
MathWorks学生竞赛团队(2021年)。机器人操作器算法设计GitHub (https://github.com/mathworks-robotics/designing-robot-manipulator-algorithms)。检索.