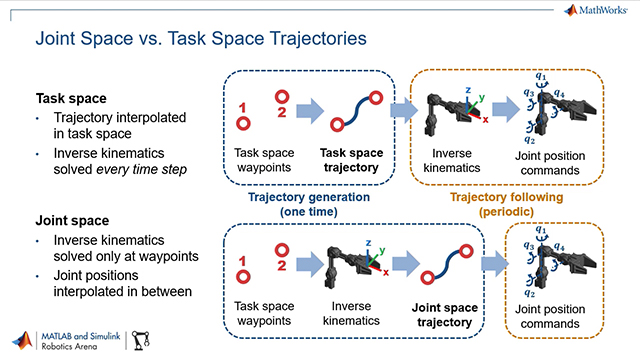
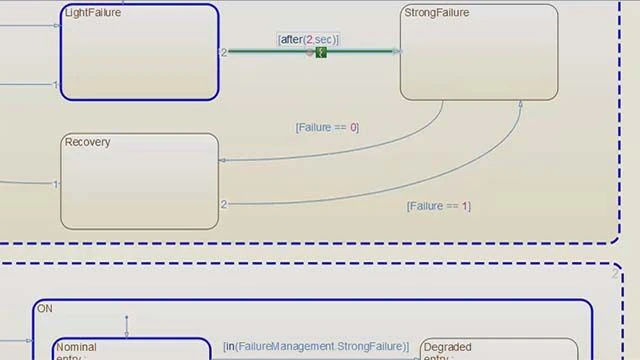
在此之前,在MATLAB和Simu金宝applink Robotics Arena:设计机器人操作器算法, Jose Avendano和Sebastian Castro讨论了如何导入机器人机械手描述文件,求解逆运动学,利用MATLAB设计监控控制算法®和仿真软金宝app件®.
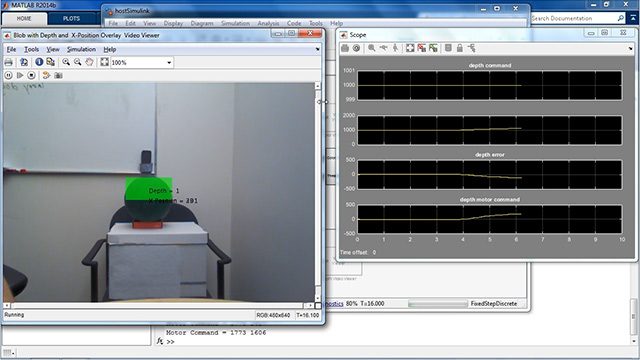
Jose和Sebastian回来讨论使用机器人系统工具箱™机器人操作器的关节力矩控制器。您将学习如何计算逆动力学,使用前馈和反馈控制器为关节执行器设计控制器,并在典型的位置控制和抓取任务中测试关节控制器的性能。
欲了解更多信息,请查看以下资源: