塞巴斯蒂安·卡斯特罗和Pulkit Kapur讨论如何部署算法MATLAB®和仿真软金宝app件®使用独立的机器人操作系统(ROS)。
首先,塞巴斯蒂安和Pulkit介绍两个工作流作为独立的ROS节点部署算法。第一种方法包括生成C / c++代码文件和手动编写c++代码兼容ROS。第二种方法结合了代码生成工具和机器人系统工具箱™自动生成和运行可执行ROS节点。
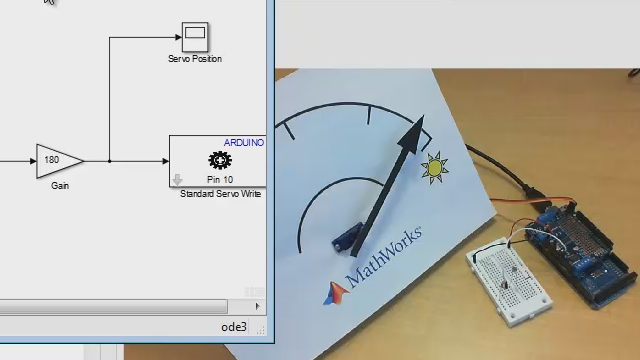
这个视频将专注于上述第二种方法。找出如何使用MATLAB仿真软件自动化部署过程,以及如何相互作用生成的代金宝app码从MATLAB和Simulink测试算法,调整参数,查看数据等等。
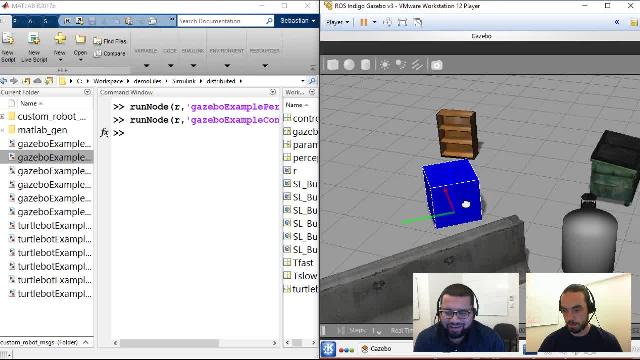
最后,您将看到一个上面演示的概念通过一个自治对象跟踪的例子。这个例子包括几个步骤部署工作流,以及强调了MATLAB的模块化和ROS通过展示使用真实和模拟部署算法TurtleBot®机器人平台。