 克里夫角:克里夫·摩尔论数学与计算
克里夫角:克里夫·摩尔论数学与计算 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区
开发区 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 物联网上的汉斯
物联网上的汉斯 赛车休息室
赛车休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
MATLAB和Simulink中的自动驾驶有什么新特性?金宝app
MATLAB和Simu金宝applink Release 2019b是关于汽车功能的一个主要版本。下面将重点介绍自动驾驶的亮点,即3D仿真功能。在设计感知系统和自动驾驶或主动安全控制算法时,这些工具可以提供很大的帮助。对于最新特性的更完整的概述,我建议检查这个R2019b功能列表如果你只感兴趣的话也可以跳到这一部分汽车应用程序.
3 d模拟环境
为主动安全或自动驾驶应用开发和调整控制算法需要大量记录的传感器数据或虚拟开发环境。如今,两者都是必需的,因为一种方法无法完全替代另一种方法。
第一种方法是在道路上行驶时收集传感器数据。这些数据将被使用,并被简单地说重放到控制算法中。数据量随着算法鲁棒性和安全性要求的增加而增加。因此,你需要在不同的条件下覆盖足够多的道路。或者,您可以依赖虚拟化的工作流,在这种工作流中,不同的条件可以在软件中完成,而且通常不需要太多的工作。
虚拟开发感知系统的基本要素如下:
- 虚拟环境基础设施
金宝app集成和联合仿真虚幻引擎4©Epic Games,允许您在逼真的3D环境中进行模拟。 - 虚拟传感器模型
可以将这些传感器看作是一些软件,它们生成的信号与实际传感器等效,但来自虚拟场景。通过R2019b,现在有了一套完整的虚拟传感器,包括相机、激光雷达和雷达。 - 虚拟的场景
自动驾驶的工具箱提供了直线和弯曲的道路、停车场、典型的美国城市街区以及高速公路。也麦西提密歇根大学(University of Michigan)的一个试验场就是其中之一。不用说,你可以创建自己的自定义场景与虚幻编辑器使用金宝app支持包.
相机传感器
仿真3D相机传感器不仅提供了世界的RGB图像数据,还提供了深度图和标签信息。可能的输出如下所示,即RGB图像(左)、灰度表示距离(中)的深度图和的输出语义分割(右)。有两种类型的相机可供选择,一种是标准焦距相机,另一种是鱼眼镜头相机。它们都有一个失真模型,你可以校准代表自定义摄像机。深度贴图可以与立体相机在后处理后输出的内容进行比较。您可能以前使用过立体相机,例如Kinect与你的Xbox相连立体视觉作为一个概念,目的是通过比较相同场景的两个或多个视图,从相机图像中恢复深度信息。语义分割技术将图像的像素与类别标签(如道路、天空、交通标志、汽车或行人)关联起来。为了能够分配标签,语义分割网络需要使用示例数据进行训练。深度学习.

激光雷达传感器
激光雷达传感器激光扫描仪有时被称为激光扫描仪,通过用激光照射目标并用传感器测量反射光,可以测量到目标的距离。3D激光雷达的输出是一个点云,即空间中的一组数据点,根据设备的水平分辨率进行更新。(也有2D激光雷达。在自动驾驶应用中,主要使用3D激光雷达)。请在下图中查找点云示例。
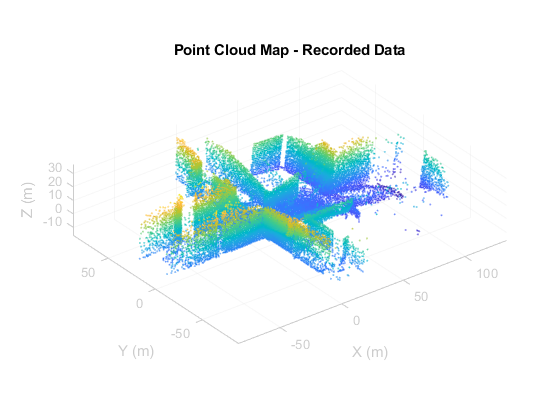
这例子这是探索基于虚拟激光雷达传感器数据开发感知算法概念的良好起点。作为旁注,请允许我再链接两个示例,说明在跟踪和地图构建方面,您可以使用激光雷达做些什么:使用激光雷达跟踪车辆和从激光雷达数据构建地图.
应用实例
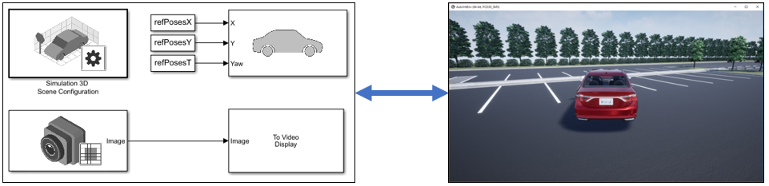
在结束关于3D虚拟环境和传感器模型的这一节时,我建议检查这个闭环控制模型的例子,称为单目摄像机感知的车道跟随控制虚拟传感器数据用于在真实的驾驶环境中控制汽车。
驾驶场景设计师
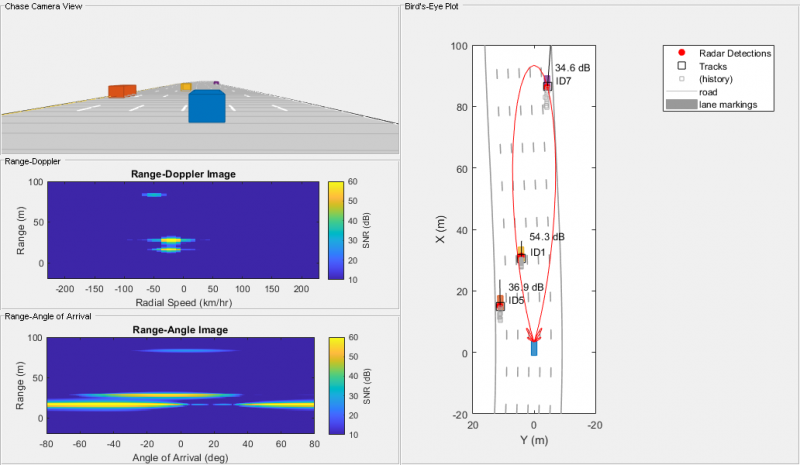
上面的例子使用了虚幻引擎4,它本身是相当计算资源方面的需求。如果您处于自动驾驶开发的早期阶段,您可能更喜欢一个更简单、更快的环境。典型的用例是评估和比较传感器配置或算法概念。在这里,驾驶场景设计师可以发挥作用。在MathWorks员工中,该工具通常被称为“长方体世界”,因为参与者以简化的方式表示为长方体。下面的示例演示了如何对雷达的硬件、信号处理和传播环境建模,当然还有长方体(请参见左上角区域)。
这个工具的美妙之处在于它的简单。您可以使用拖放界面创建道路和角色模型。你也可以导入OpenDRIVE®数据如果它对您想要的场景是可用的。在安全关键应用的背景下,如紧急制动,紧急车道保持,车道保持辅助系统,一个预先建立的库代表欧洲新车评估计划(Euro NCAP®)的情景测试协议可用。
金宝app仿真软件的集成
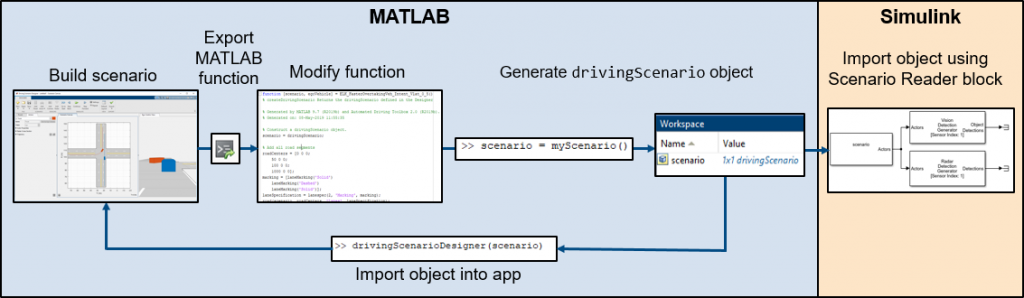
下面是如何将驾驶场景设计器与Simulink结合使用的流程图。金宝app
应用实例
为了保持这篇博文的精神,我还在这里链接了一个示例,您可以在这里尝试该功能。它被称为"使用驾驶场景测试闭环ADAS算法”.
结论
总的来说,我希望你觉得这篇博文有趣,并且与你的工作相关。由于自动驾驶是一个巨大的主题,我们实际上欢迎你就我们将来应该涉及的内容提出意见和指导。
谢谢,最好的,
克里斯托夫
- 类别:
- 自动驾驶,
- 汽车、
- MATLAB,
- 金宝app仿真软件,
- 工作流





评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。