 Cleve's Corner:数学和计算上的Clyver
Cleve's Corner:数学和计算上的Clyver Loren在Matlab的艺术上
Loren在Matlab的艺术上 史蒂夫在图像处理和matlab上
史蒂夫在图像处理和matlab上 Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 深度学习
深度学习 开发人员区
开发人员区 Stuart的Matlab视频
Stuart的Matlab视频 在头条线后面
在头条线后面 本周的文件交换选择
本周的文件交换选择 汉斯在某种程度上
汉斯在某种程度上 赛车休息室
赛车休息室 初创公司,加速器和企业家
初创公司,加速器和企业家 Matlab社区
Matlab社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー
如何使用MATLAB和SIMULINK在公式BHARAT上获胜金宝app
对于今天的帖子,我想介绍你raftar公式赛车从印度理工学院马德拉斯。他们最近赢了惯例Bharat.2020在燃烧类别中。该团队将分享他们使用MATLAB和SIMULINK进行车辆设计的经验。金宝app非常感谢,舞台是你的!

介绍
Matlab,S金宝appimulink和Simscape已被证明是有益于理解我们的公式学生RaceCar,并帮助我们制定并验证了关键的设计决策。使用正确的工具,给了我们竞争优势,负责我们最近的胜利惯例Bharat.2020。
搭载时间模拟
为了确定车辆参数对轨道上车的整体性能的影响,使用MATLAB开发了搭扣时间仿真。目标是建立一个模型,可以用于为车辆制定高级决策,包括对整体循环时间的影响。例如,重量增加的效果,一套新的轮胎,提供更好的抓地力,以及考虑阻力和下降的航空包。这个问题的两部分是轨道上的轨道建模和建模车辆行为。
在车辆模型验证研究所建立了195米赛道,并比较不同的驱动程序和车辆设置。X-Y坐标和每个点处的曲率是模型中使用的轨道数据输入。使用GPS记录器记录轨道数据以计算每个点处的曲率半径。假设摩擦系数是恒定的,使用自行车模型计算每个点处的速度。此外,鉴定了汽车制动的区域。
假设峰值制动减速,通过从顶点速度向后计算,计算直截面达到的最大速度。最后,此信息用于计算总时间。
所获得的圈时间比195米轨道周围录制的最快膝盖快约1.5秒。在选择汽车的最终驱动比并确定汽车的最佳冷却所需的散热器面积是至关重要的。从循环时间模拟中获得的信息也用于在下一节中讨论的组分级模拟中。
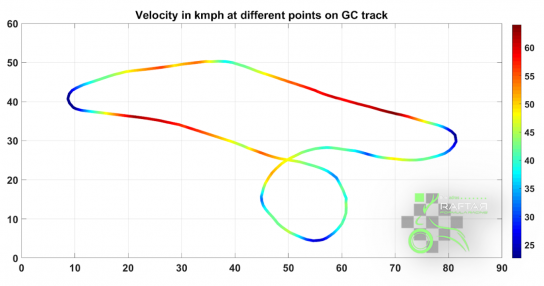
图1.在轨道上的各个点获得的速度
冷却模型
该模型的目标是建立一种工具,该工具可用于研究诸如散热器区域的所有冷却参数,相互作用的液体的温度和流体的质量流量及其对系统的影响。该模型是在LAP仿真上构建的,并使用其输入作为发动机RPM和车辆速度来计算冷却参数。使用LAP模拟的好处是它让我们了解发动机冷却剂的温度如何在轨道上变化。基于这些结果,选择散热器面积和风扇速度。
建立模型的第一步是从轨道收集数据,并创造发动机热负荷的数学方程,整体传热系数,空气和水的质量流量。所有这些等式都使用独立的变量输入作为发动机RPM或车辆速度或两者。
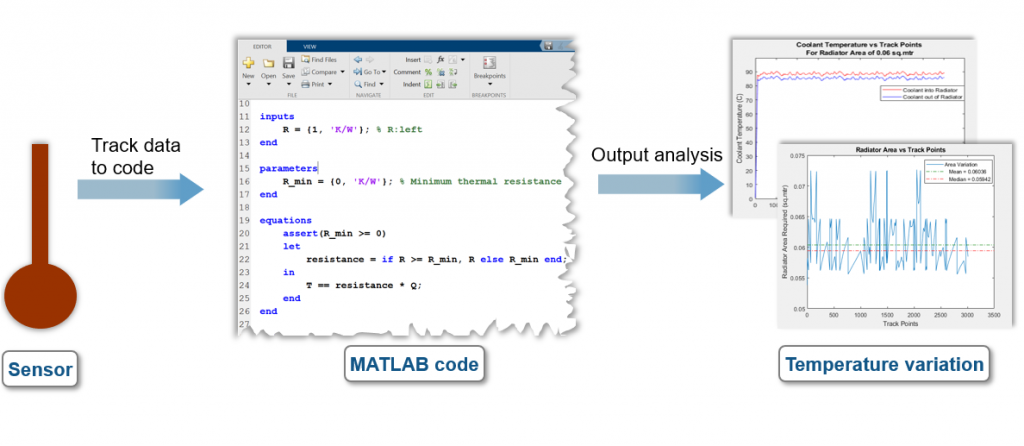
2.冷却模型的工作流程
在导出方程之后,我们运行了两次模拟。第一个,在轨道上的各个点上找到区域要求,并决定什么可能是散热器所需的区域。发动机冷却剂温度保持恒定,并且运行多个圈以查看轨道上不同区域所需的区域。
第二种模拟有助于我们研究所选散热器面积对温度的影响。在完成散热器区域之前,我们使用不同区域进行多次模拟。
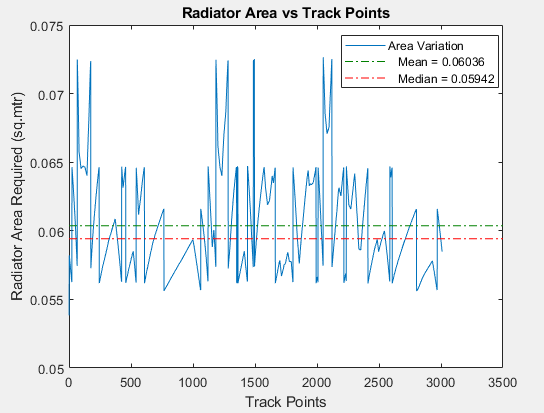
图3.轨道上的区域变异
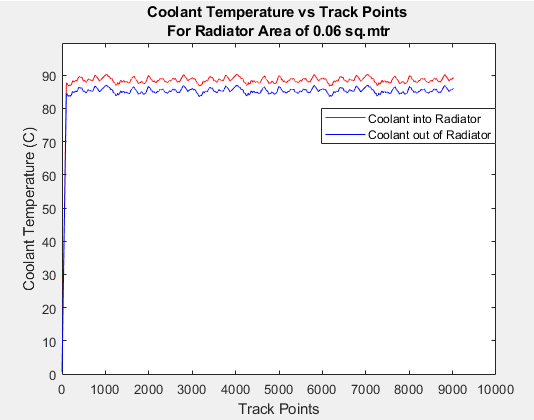
图4.发动机冷却剂温度的变化
Simscape车型
为了计算峰值减速和车辆停止时间,我们在Simscape中开发了一个模型。该模型还提供了考虑到纵向负载转移的效果的前后制动压力之间的关系。
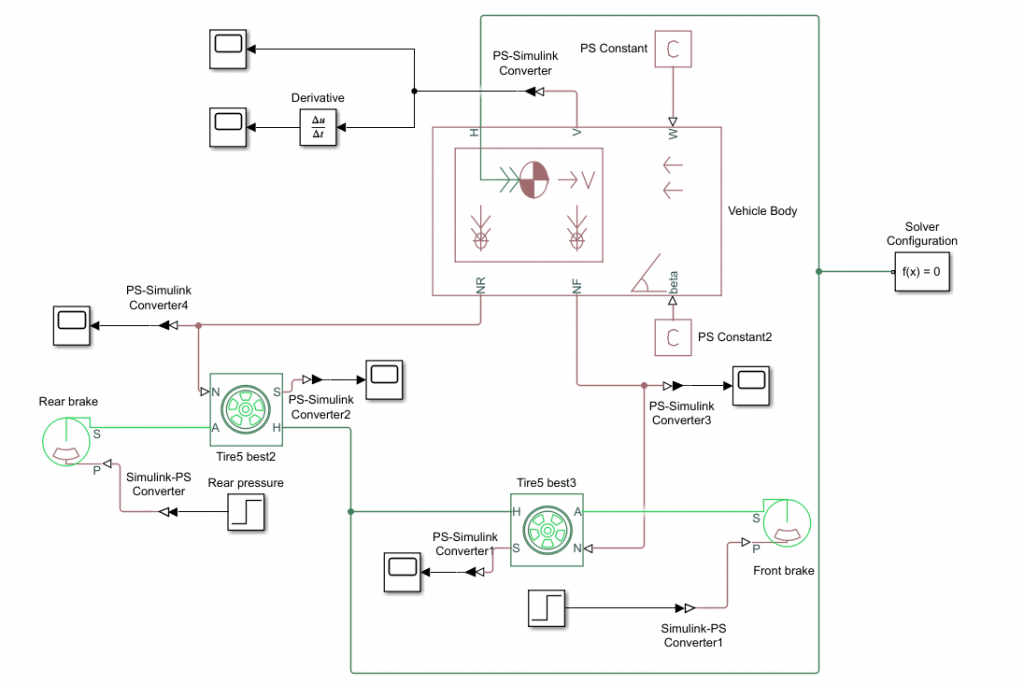
图5. Simscape模型
模型的输入是汽车的初始速度和前后制动压力。获得的输出是速度,加速度,负载转移和前后滑动比曲线。该模型包括以下子组件:
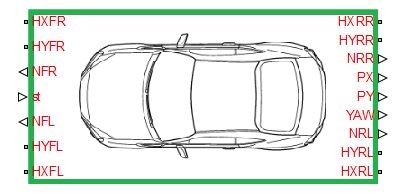
1)车身
我们使用车身块来模拟纵向车辆动态。该块认为重量,轴距,重心的高度(CG)和初始速度和各种其他必要的车身参数。它有一个内置编程,以计算检测到加速时的负载传输。
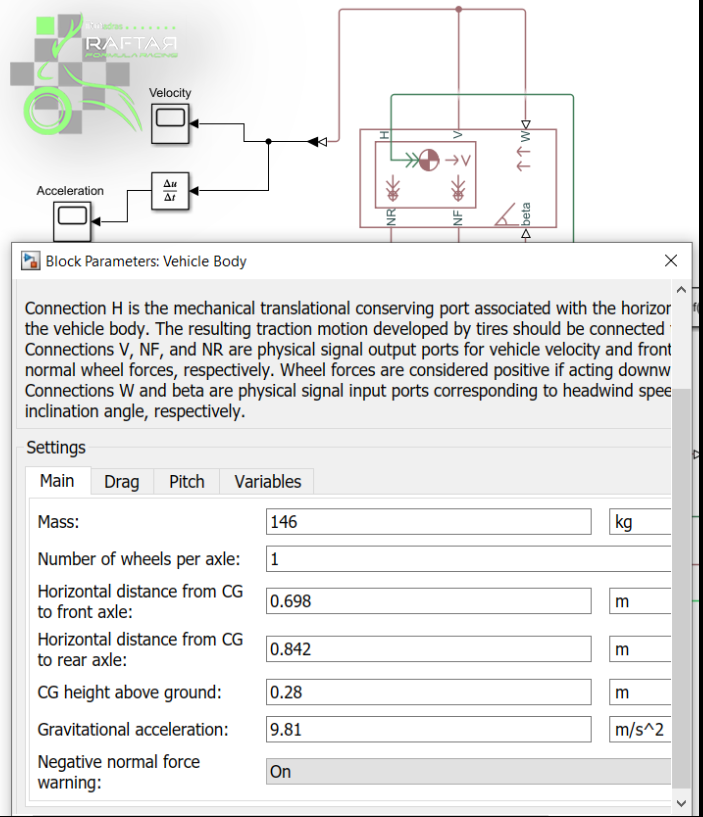
图6.车身参数
2)制动模型
Simscape中的转子模型是具有转子几何形状,卡尺几何和摩擦系数的数学模型。该块的输入是制动压力,并且输出是通过旋转节约端口的制动扭矩。
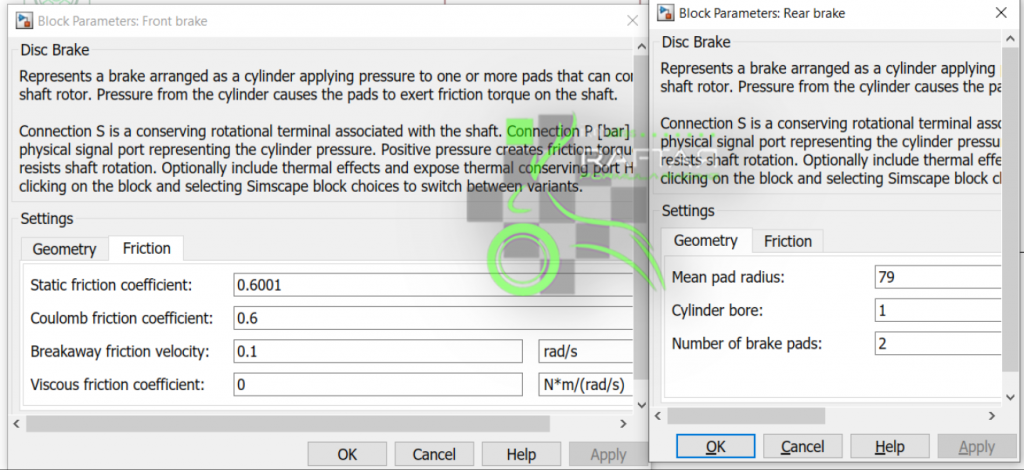
图7.盘式制动参数
3)轮胎模型
Simscape中的轮胎使用Pacejka 2002模型使用Magic Fapers中的负载相关的纵向系数进行建模。除此之外,还包括轮胎尺寸。输入是正常负载,输出滑移率。在轮胎块中限定了Hoosier R25B轮胎数据的系数。我们包括其中两个块来表示前轮和后轮胎。
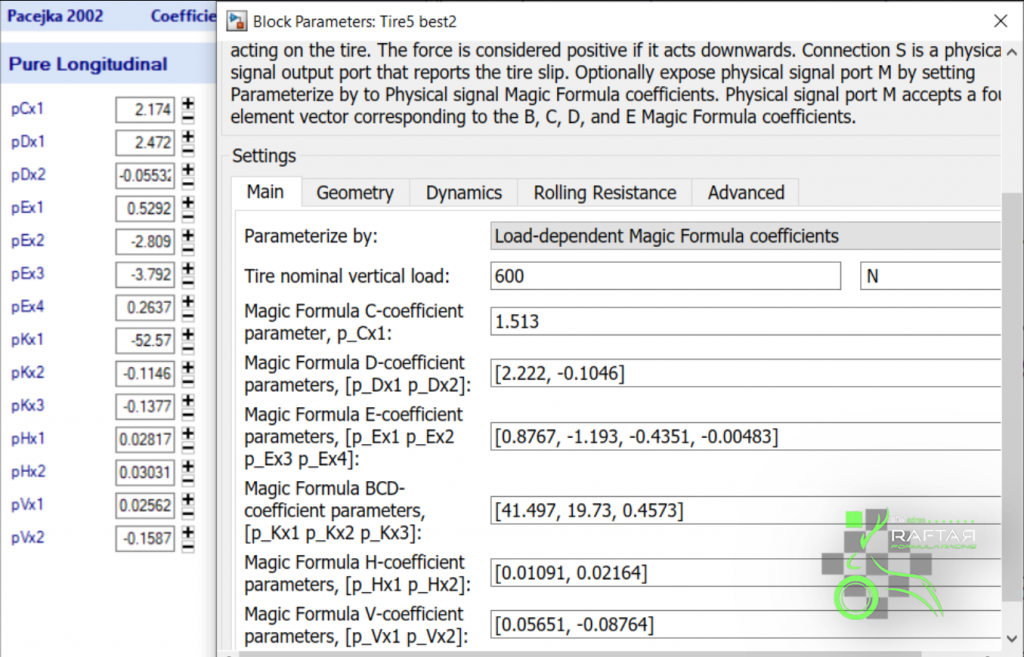
图8.轮胎参数
最后,所有物理块都使用物理信号连接。车型通过占轮胎力的平移节省港口连接到轮胎。此外,这些轮胎通过角度机械保护口通过由作用在轮胎上的转子产生的扭矩连接到制动转子。车辆的正常力输出进入轮胎。该模型是闭环,其中由轮胎产生的力被馈送到车辆中,并且在车辆模型的负载转移期间计算的正常负载被送回轮胎模型。最后,仿真结果为我们提供了关于施加制动时的峰值减速和车辆停止时间的信息。
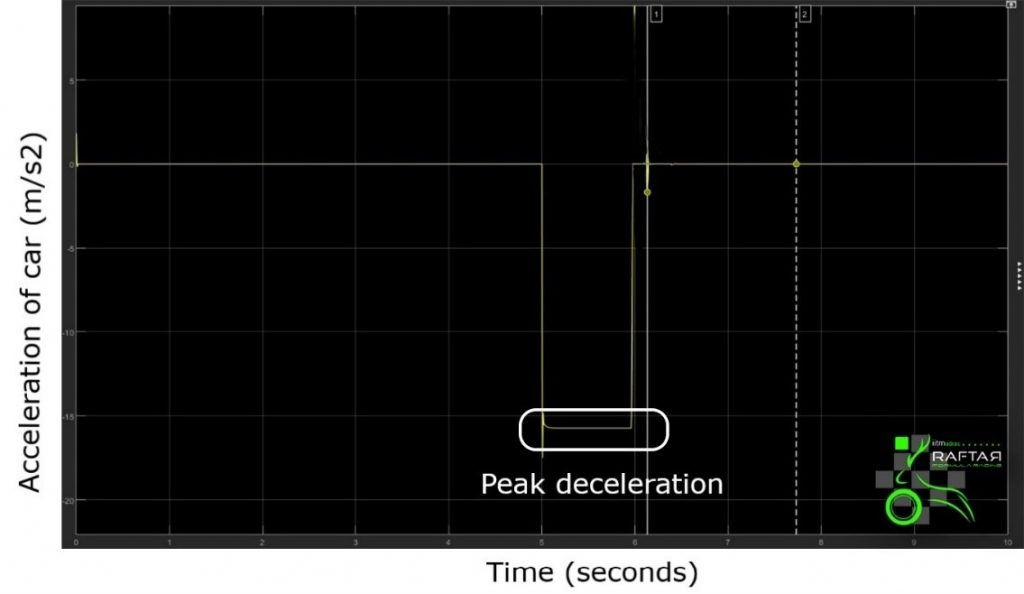
图9.峰减速
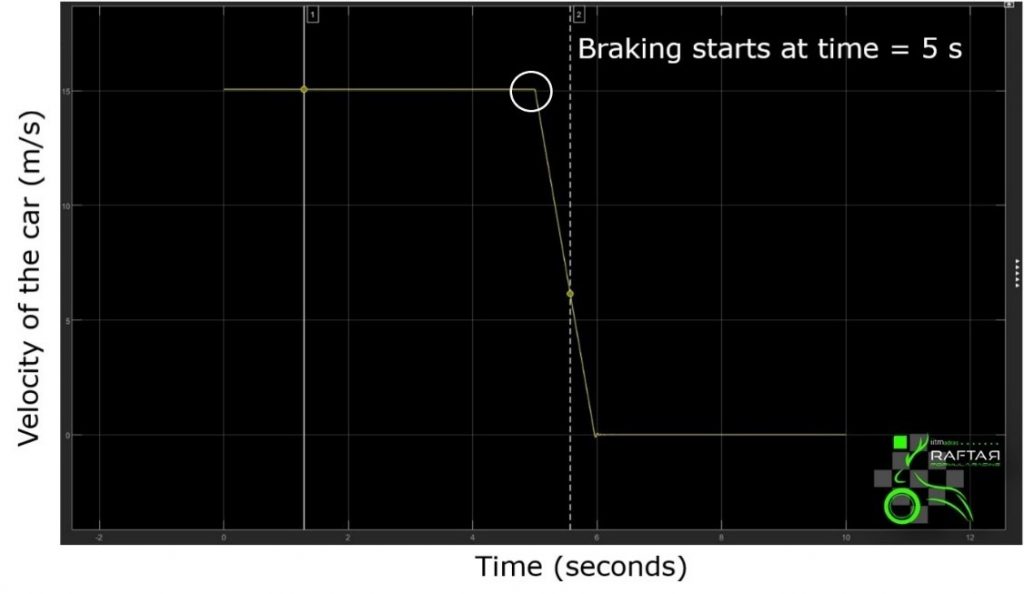
图10.制动
我们正在进行的项目
遥测系统
该系统允许团队记录传感器数据并可视化实时赛车参数。该系统是一个即插即用,可以连接到任何CAN总线系统和定制频道,这是OEM部件的主要优势。该系统具有直接连接使用I2C,UART,SPI和各种其他协议进行通信的传感器的附加功能,并获得由连接到系统连接的所有信号组成的单个时联数据集。
该系统由Raspberry PI控制,带有MCP2515板的CAN总线通信和5dBi天线,以提供足够的遥测范围。在接收坑上,MATLAB和SIMU金宝appLINK金宝app支持覆盆子PI的软件包用于可定制的数据可视化。在Raspberry PI上设置Python脚本,以设置CAN通道并在SD卡上记录数据。Raspberry PI被设置为无线接入点,并将其网络托管PIT计算机将SSH连接到Raspberry PI并访问数据流。这也允许我们将多个设备(如我们的扇区定时电路)连接到由Raspberry PI托管的无线网络。
我们计划最终使用Raspberry PI进行数据记录和遥测目的,从而消除了对额外的测井单元的需求。我们还在努力在Raspberry PI和ECU之间建立Modbus通信链路。这将使我们能够分别真正同步从ECU和CAN总线获得的2个数据流之间。这允许来自2个系统的传感器之间的传感器融合,并使我们能够为发动机控制和有源器件的控制来实现更强大的稳健算法。它还使数据的后处理更简单,因为我们不必关联共同的信号以获得数据集之间的时间同步。一旦实现了这一点,下一步骤将使用覆盆子PI来控制仪表板,从而允许我们在垂直仪表板上的实际上显示汽车的任何参数。此方法的最终实施如下:
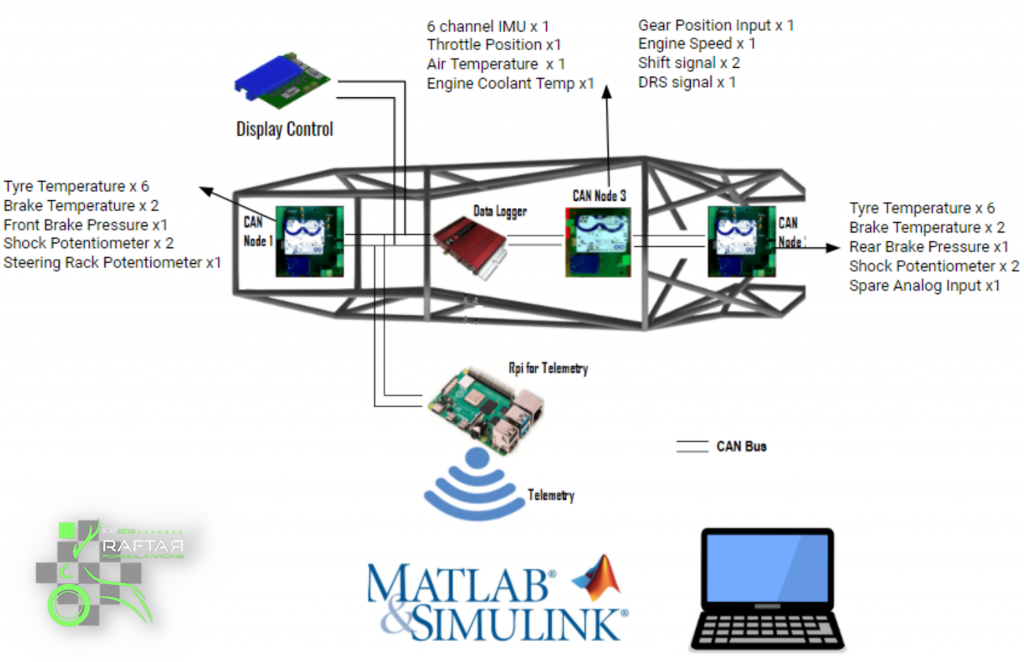
图11. CAN总线实现原理图
结论
通过事先进行不同的模拟,我们能够采取关键的设计决策来竞争各种国家和国际竞争。目前,我们的团队正在研究各种项目来改善车辆设计。为了获得进度的更新,可以随意加入我们的Facebook和Instagram.团体。
谢谢,
raftar公式赛车






注释
要发表评论,请点击这里登录您的MathWorks帐户或创建新的。