预测
使用扩展或Unspented Kalman滤波器或粒子滤波器预测状态和状态估计在下次步骤中的误差协方差
句法
描述
该预测命令预测状态和状态估计错误协方差ExtendedKalmanFilter.那undentedkalmanfilter要么粒子滤片在下次步骤的对象。要实现扩展或Unscented Kalman滤波器算法,请使用预测和正确命令一起。如果存在当前的输出测量,则可以使用预测和正确。如果缺少测量,则只能使用预测。有关使用命令的订单的信息,请参阅使用预测和正确的命令。
[预测扩展或Unscented Kalman滤波器的状态估计和状态估计误差协方差,或粒子过滤器对象预测斯特ate.那predightstatecovariance.) =预测(obj.)obj.在下一次步骤。
你创造了obj.使用ExtendedKalmanFilter.那undentedkalmanfilter要么粒子滤片命令。您指定了非线性系统的状态转换功能和测量功能obj.。您还指定了过程和测量噪声术语是否在这些功能中是附加的或非不起作用。该州对象的属性存储最新的估计状态值。假设在时间步骤K.那obj.state.是
。该值是时间估计的时间K.,估计使用测量的输出直到时间K.。当你使用的时候预测命令,软件返回
在里面预测斯特ate.输出。哪里
是时候估计时间K + 1,估计使用测量输出直到时间K.。该命令返回状态估计错误协方差
在里面predightstatecovariance.输出。该软件还更新了州和StateCovariance.属性obj.使用这些校正的值。
如果状态转换函数,请使用此语法F你指定的obj.statetransitionfcn.具有以下形式之一:
x(k)= f(x(k-1))- 用于添加过程噪声。x(k)= f(x(k-1),w(k-1))- 对于非资本过程噪声。
哪里X和W.是系统的状态和过程噪声。唯一的输入F是州和过程噪音。
[如果系统的状态转换功能需要这些输入,则指定其他输入参数。您可以指定多个参数。预测斯特ate.那predightstatecovariance.) =预测(obj.那US1,... USN)
如果您的状态转换功能,请使用此语法F具有以下形式之一:
x(k)= f(x(k-1),US1,... USN)- 用于添加过程噪声。x(k)= f(x(k-1),w(k-1),US1,... USN)- 对于非资本过程噪声。
例子
使用Unspented Kalman Filter在线估算状态
用无迹卡尔曼滤波算法和测量输出数据估计范德堡尔振荡器的状态。振荡器有两个状态和一个输出。
为振荡器创建一个Unscented Kalman筛选对象。使用先前写入和保存的状态转换和测量功能,vdpstatefcn.m.和vdpmeasurementfcn.m.。这些功能描述了与Van der POL振荡器的离散近似,具有非线性参数,MU,等于1.该功能假设系统中的添加过程和测量噪声。指定两个状态为[1; 0]的初始状态值。这是初始时间猜测状态值的猜测K.,使用系统输出的知识直到时间K-1那
。
obj = UnscentedkalmanFilter(@ vdpstatefcn,@ vdpmeasurementfcn,[1; 0]);
加载测量的输出数据,y,来自振荡器。在此示例中,使用模拟静态数据进行插图。数据存储在vdp_data.mat.文件。
加载vdp_data.mat.y
指定振荡器的过程噪声和测量噪声Coverce。
obj.processnoise = 0.01;obj.measurementnoise = 0.16;
初始化阵列以捕获估计结果。
ResidBuf = [];Xcorbuf = [];xpredbuf = [];
实现UndEnded Kalman滤波器算法来估计振荡器的状态通过使用该算法正确和预测命令。你第一次正确
在时间使用测量K.要得到
。然后,您在下次步骤中预测状态值,
,使用
,状态估计时间步长K.估计使用测量直到时间K.。
为了模拟实时数据测量,一次使用测量的数据一次。计算预测和实际测量之间的残差,以评估滤波器的执行和收敛程度。计算残差是一个可选步骤。当你使用时剩余的,请将命令放在之前正确命令。如果预测与测量匹配,则剩余为零。
执行时间步骤的实时命令后,缓冲结果,以便在运行完成后可以绘制它们。
对于k = 1:尺寸(y)[残差,残余转移性] =残差(obj,y(k));[纠正符,纠正符号统计信息] =正确(OBJ,Y(k));[预测史泰,predgegetstatecovariance] =预测(obj);REALBUF(k,:)=残差;Xcorbuf(k,:) =纠正符';xpredbuf(k,:) = predgegetstate';结束
当你使用的时候正确命令,obj.state.和obj.statecovariance.使用纠正状态和状态估计更新时间步骤的错误协方差值K.那纠正符号和纠正策略。当你使用的时候预测命令,obj.state.和obj.statecovariance.使用预测值进行更新时间步骤K + 1那预测斯特ate.和predightstatecovariance.。
在这个例子中,你使用过正确之前预测因为初始状态值是
,猜测初始时间的状态值K.使用系统输出直到时间K-1。如果您的初始状态值是
,上次的价值K-1使用测量直到K-1,然后使用预测首先命令。有关使用顺序的更多信息预测和正确,看看使用预测和正确的命令。
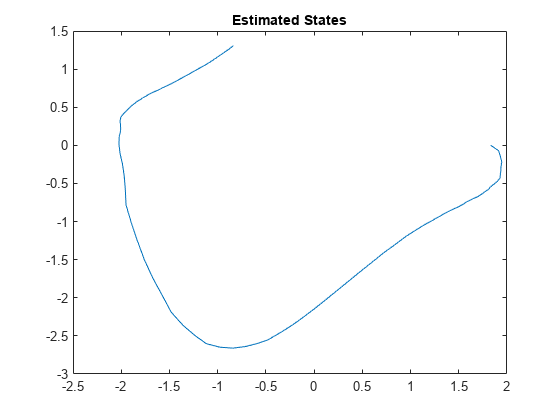
使用Publectrection值绘制估计的状态。
绘图(Xcorbuf(:,1),Xcorbuf(:,2))标题('估计的国家')
绘制实际测量,校正的估计测量和残差。用于测量功能vdpmeasurementfcn.,测量是第一个状态。
m = [y,xcorbuf(:,1),RESTBUF];绘图(m)网格上标题(“实际和估计测量,剩余”)传奇('衡量'那'估计'那'剩余的')
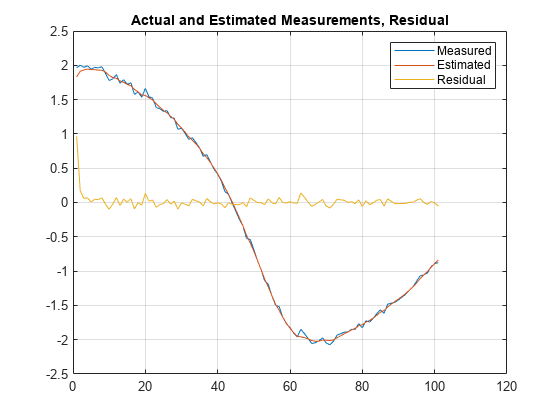
估计敏捷地追踪测量值。在初始瞬态之后,在整个运行过程中剩余仍然相对较小。
使用粒子过滤器在线估算状态
加载van der pol ode数据,并指定采样时间。
vdpodedata.mat.包含使用ODE45的非线性参数mu = 1的van der POL ode的模拟,具有初始条件[2; 0]。用采样时间提取真正的状态dt = 0.05。
AddPath(FullFile(Matlabroot,“例子”那'控制'那'主要')))%添加示例数据负载('vdpodedata.mat'那'xtrue'那'dt')TSPAN = 0:DT:5;
得到了测量。在这个例子中,一个传感器测量带有标准偏差的高斯噪声的第一状态0.04。
SQRTR = 0.04;YMEAS = XTRUE(:,1)+ SQRTR * RANDN(NUMER(TSPAN),1);
创建粒子过滤器,并设置状态转换和测量似然函数。
mypf = plaretfilter(@ vdpparticlefilterstatefcn,@ vdpmeasurementlikelihoodfcn);
在状态下初始化粒子滤波器[2;0]与单位协方差,并使用1000粒子。
初始化(mypf,1000,[2; 0],眼睛(2));
选择的意思是国家估计和系统的重采样方法。
mypf.stateestimationMethod ='意思';mypf.resamplingmethod ='systematic';
使用该州估算各国正确和预测命令,并存储估计的状态。
XEST =零(尺寸(XTRUE));对于k = 1:尺寸(xtrue,1)xest(k,:) =正确(mypf,Ymeas(k));预测(MYPF);结束
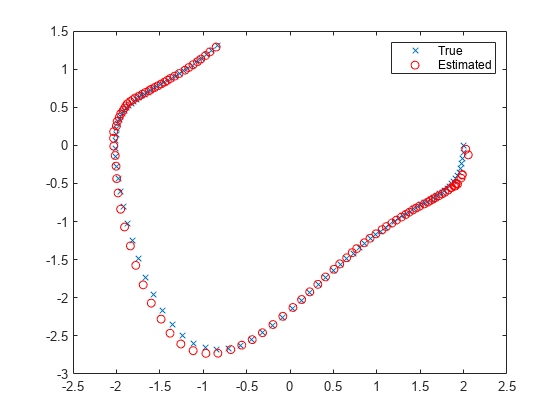
绘制结果,并比较估计和真正的状态。
图(1)绘图(Xtrue(:,1),Xtrue(:,2),'X',XEST(:1),XEST(:,2),'ro')传奇('真正'那'估计')
rmpath(fullfile(matlabroot,“例子”那'控制'那'主要')))%删除示例数据
使用其他输入指定状态转换和测量功能
考虑一个带输入的非线性系统你谁的状态X和测量y根据以下状态转换和测量方程式化:
过程噪声W.当测量噪声存在时,系统的噪声是可加性的V.是非过度的。
为系统创建状态转换功能和测量功能。使用额外输入指定函数你。
f = @(x,u)(sqrt(x + u));h = @(x,v,u)(x + 2 * u + v ^ 2);
F和H分别存储状态转换和度量函数的匿名函数的函数句柄。在测量函数中,由于测量噪声是非加性的,V.也被指定为输入。注意V.被指定为额外输入之前的输入你。
创建一个扩展的卡尔曼筛选对象,用于使用指定的函数估计非线性系统的状态。将状态的初始值指定为1,并且测量噪声为非二倍。
obj = ExtendedKalmanFilter(F,H,1,'hasadditivemeasurementnoise',假);
指定测量噪声协方差。
obj.measurementnoise = 0.01;
现在,您可以使用预测和正确命令。你通过了价值你至预测和正确,其分别将它们传递给状态转换和测量功能。
用测量校正国家估计y[K.] =0.8并输入你[K.] =0.2在时间步骤K.。
正确的(obj, 0.8, 0.2)
在下次步骤中预测状态你[K.] =0.2。
预测(OBJ,0.2)
检索错误或剩余的,在预测和测量之间。
[残余,残留性转移性] =残差(OBJ,0.8,0.2);
输入参数
输出参数
更多关于
您还可以从以下列表中选择一个网站:
