插
沿规划道路车辆姿势插值
描述
例子
规划路径并检查其有效性
通过使用最佳的快速随机树(RRT *)算法,通过规划停车场的车辆路径。检查路径是否有效,然后绘制沿路径的转换姿势。
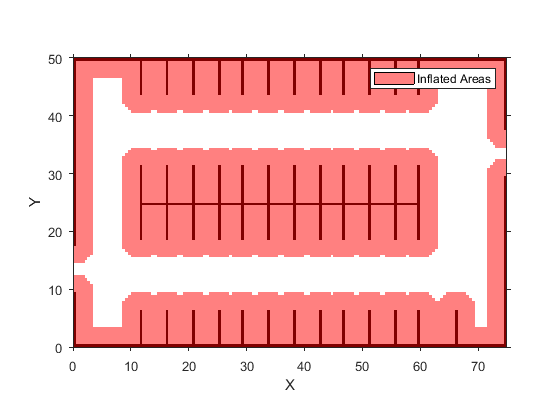
加载一个停车场的成本地图。绘制成本地图,以看到停车场和膨胀的区域,为车辆避免。
数据=负载(“parkingLotCostmap.mat”);costmap = data.parkingLotCostmap;图(costmap)
将车辆的起始姿势和目标姿势定义为[X,ÿ,Θ]载体。世界单位为(X,ÿ)位置是在米。世界单位为Θ取向角的单位为度。
startPose = [4,4,90];%[米,米,度]goalPose = [30,13,0];
用一个pathPlannerRRT目标规划从起始姿势到目标姿势的路径。
规划师= pathPlannerRRT (costmap);refPath =计划(计划、startPose goalPose);
检查路径是否有效。
isPathValid = checkPathValidity (refPath costmap)
isPathValid =合乎逻辑1
插值沿路径的转换姿势。
transitionPoses =插入(refPath);
在成本图上标出计划的路径和过渡位置。
保持在图(refPath,'显示名称',“计划路径”)散射(transitionPoses(:,1),transitionPoses(:,2),[]'填充',...'显示名称',“过渡体式”)举行从

规划路径和插补沿路径
通过使用快速随机树(RRT *)算法,通过规划停车场的车辆路径。沿路径点插值车辆的姿势。
加载一个停车场的成本地图。绘制成本地图,以看到停车场和膨胀的区域,为车辆避免。
数据=负载(“parkingLotCostmap.mat”);costmap = data.parkingLotCostmap;图(costmap)

定义车辆的起始姿势和目标姿势为[X,ÿ,Θ]向量。世界单位为(X,ÿ)位置是在米。世界单位为Θ取向角的单位为度。
startPose = [4,4,90];%[米,米,度]goalPose = [30,13,0];
用一个pathPlannerRRT目标规划从起始姿势到目标姿势的路径。
规划师= pathPlannerRRT (costmap);refPath =计划(计划、startPose goalPose);
在整个路径上每1米对车辆进行一次插值。
长度= 0:1:refPath.Length;姿势=插补(refPath,长度);
剧情上costmap插值姿势。
情节(costmap)在散射(姿势(:,1),姿势(:,2),'显示名称',“插值体式”)举行从

输入参数
输出参数
更多关于
过渡体式
路径是由多个节段是运动的组合(例如,左转,直,和右转)的。过渡姿势是与一个运动的结束和另一个运动的开始相对应的车辆姿态。它们表示路径上对应于车辆方向或方向改变的点。该插函数总是返回过渡的姿势,即使你在沿着路径的指定点仅插值。
过渡位姿之间的路径长度由MotionLengths路径段的属性。例如,考虑下面的路径,这是一个driving.Path对象由单个Dubins路径段组成。这部分由三个运动组成,如MotionLengths和MotionTypes该段的性质。

该插功能插在下面这个命令转换姿势:
车辆的初始姿势,
StartPose。离开车辆转弯后的姿势(
“L”)在其最大转向角4.39米。车后的姿势会直(
“S”) 6.32米。车后的姿势向右转(
“R”)在其最大转向角4.39米。这个姿势也是目标的姿势,因为它是整个路径的最后姿势。
该图显示这些过渡姿势,其是[X,ÿ,Θ]载体。X和ÿ指定世界单位,如米,车辆的位置。Θ指定车辆的以度为单位的方位角度。
![]()
扩展功能
介绍了在R2018b
你也可以从以下列表中选择一个网站:
