checkPathValidity
检查计划车辆路径的有效性
描述
例子
规划路径并检查其有效性
使用最优快速探索随机树(RRT*)算法规划车辆通过停车场的路径。检查路径是否有效,然后绘制沿路径的过渡位姿。
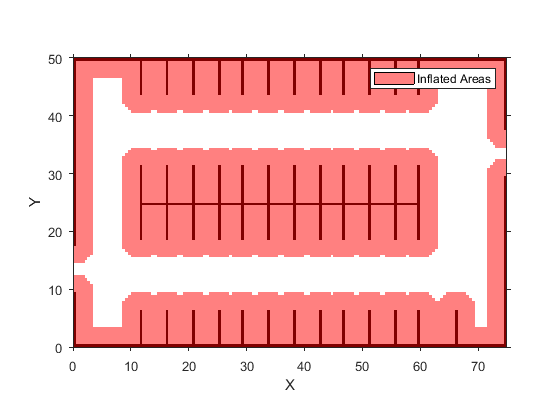
加载一个停车场的成本地图。绘制成本地图,以看到停车场和膨胀的区域,为车辆避免。
data =负载(“parkingLotCostmap.mat”);costmap = data.parkingLotCostmap;情节(costmap)
将车辆的起始姿势和目标姿势定义为[x,y,Θ)向量。世界单位(x,y)地点以米为单位。世界单位为Θ方位角的单位是度。
startPose = [4,4,90];%[米,米,度]goalPose = [30, 13, 0];
使用一个pathPlannerRRT目标规划从起始姿势到目标姿势的路径。
规划师= pathPlannerRRT (costmap);refPath =计划(计划、startPose goalPose);
检查路径是否有效。
isPathValid = checkPathValidity (refPath costmap)
isPathValid =逻辑1
沿路径插入过渡位姿。
transitionPoses =插入(refPath);
在成本图上标出计划的路径和过渡位置。
持有在情节(refPath“DisplayName的”,“计划路径”)散射(transitionPoses (: 1) transitionPoses (:, 2), [],“填充”,…“DisplayName的”,“过渡姿势”)举行从

输入参数
输出参数
算法
若要检查车辆路径是否有效,则checkPathValidity函数离散路径。然后,该函数检查在离散点的姿态是无碰撞的。无碰撞姿态的阈值取决于其分辨率checkPathValidity可获得。
扩展功能
介绍了R2018a
你也可以从以下列表中选择一个网站:
