lateralControllerStanley
使用Stanley方法计算路径跟踪的转向角命令
语法
描述
steerCmd= lateralControllerStanley (refPose,currPose,currVelocity)
控制器使用Stanley方法计算转向角指令[1],其控制律基于运动学自行车模型。在低速环境下,惯性效应很小的情况下,使用该控制器进行路径跟踪。
例子
输入参数
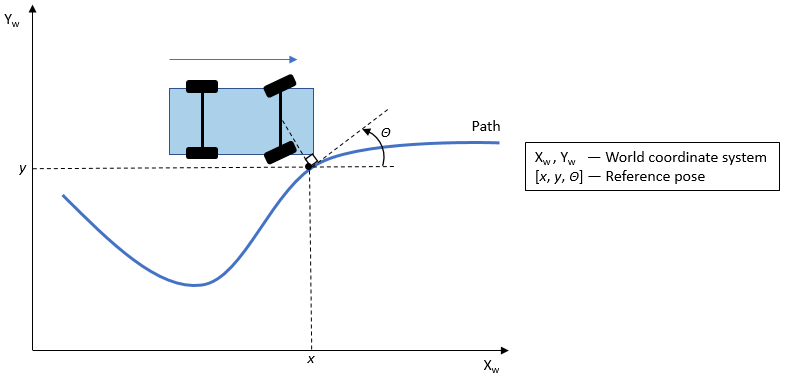
refPose- - - - - -参考姿势
(x,y,Θ)向量
参考位姿,指定为[x,y,Θ)向量。x和y单位是米,和Θ是在度。
x和y指定参考点,引导车辆转向。Θ指定此参考点处的路径的方向角,且在逆时针方向上为正。
对于前进中的车辆,参考点是最接近车辆前轴中心的路径上的点。
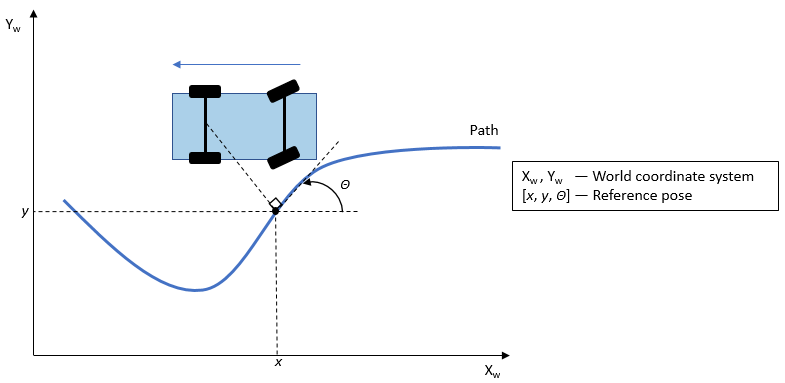
对于反向行驶的车辆,参考点是最接近车辆后轴中心的路径上的点。


数据类型:单|双
currPose- - - - - -当前的姿势
(x,y,Θ)向量
车辆的当前姿态,指定为[x,y,Θ)向量。x和y单位是米,和Θ是在度。
x和y指定车辆的位置,定义为车辆后轴的中心。
Θ指定车辆在指定位置的方向角(x,y,逆时针方向为正。
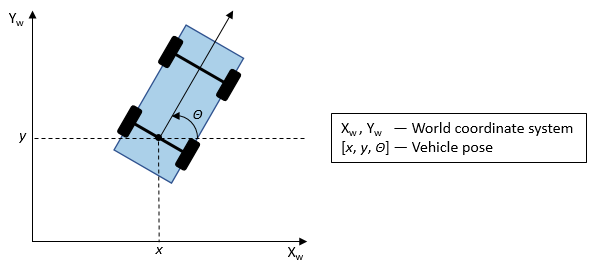
有关车辆姿态的详细信息,请参阅自动驾驶工具箱中的坐标系统。
数据类型:单|双
currVelocity- - - - - -当前的纵向速度
真正的标量
车辆的当前纵向速度,指定为实标量。单位是米每秒。
如果车辆在向前运动,那么这个值必须大于0。
如果车辆在逆行,则此值必须小于0。
值0表示车辆不处于运动状态。
数据类型:单|双
名称-值对的观点
指定可选的逗号分隔的对名称,值参数。的名字参数名和价值是对应的值。的名字必须出现在引号内。可以按任意顺序指定多个名称和值对参数Name1, Value1,…,的家。
“MaxSteeringAngle”, 25岁
输出参数
steerCmd-转向角指令
真正的标量

算法
为了计算转向角指令,控制器将当前位姿相对于参考位姿的位置误差和角度误差最小化。车辆的行驶方向决定了这些误差值。
当车辆向前行驶时(“方向”名称-值对是1):
的位置误差为从前轴中心到路径上参考点的横向距离。
的角误差是前轮相对于参考路径的角度。
当车辆在倒车时(“方向”名称-值对是1):
的位置误差为后桥中心到路径上参考点的横向距离。
的角误差是后轮相对于参考路径的角度。
有关控制器如何最小化这些错误的详细信息,请参阅[1]。
参考文献
[1] Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo,和Sebastian Thrun。越野自动汽车轨迹跟踪:控制器设计、实验验证和赛车。美国控制会议。2007年,页2296 - 2301。doi: 10.1109 / ACC.2007.4282788
扩展功能
介绍了R2018b
你也可以从以下列表中选择一个网站:
