横向控制器斯坦利
通过使用斯坦利方法车辆路径下列控制转向角
- 图书馆:
自动驾驶工具箱/车辆控制
描述
该横向控制器斯坦利block计算转向角度命令,以度为单位,根据车辆当前的速度和方向,调整车辆当前的姿态以匹配参考姿态。控制器使用Stanley方法计算这个命令[1],其控制法是基于两者运动学和动力学自行车模型。为了模型之间切换,使用汽车模型参数。
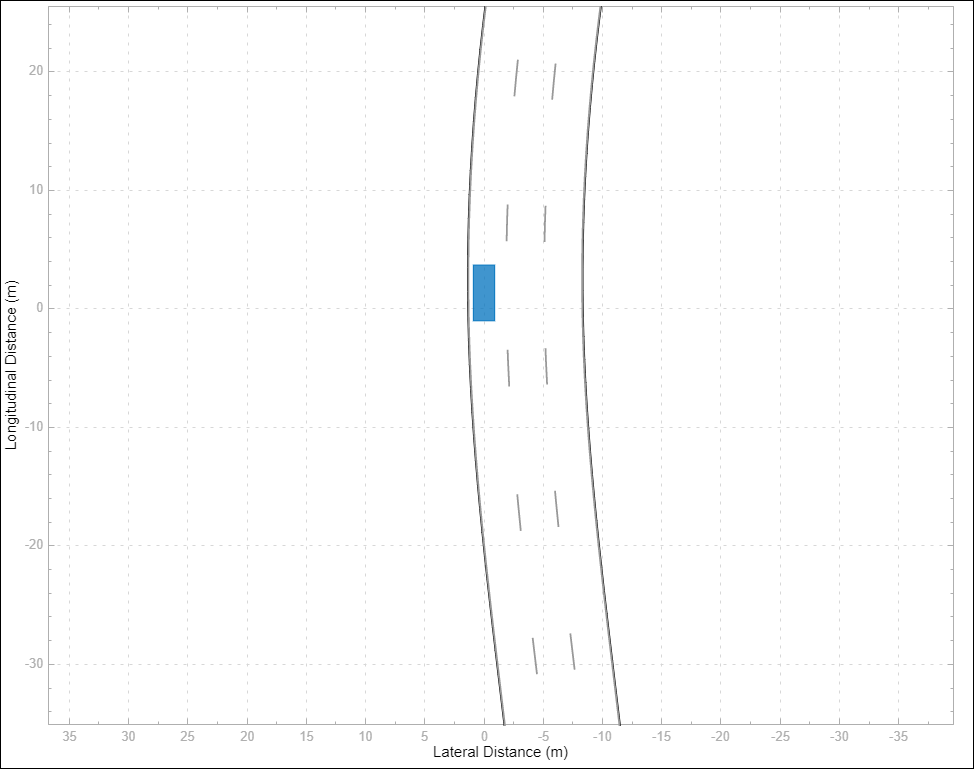
运动学自行车模型适用于低速环境,例如停车场,其中惯性效应是最小的下面的路径。
动态自行车模型适用于高速公路等惯性效应比较明显的高速环境下的路径跟随。该车辆模型提供了描述车辆动力学的附加参数。
港口
输入
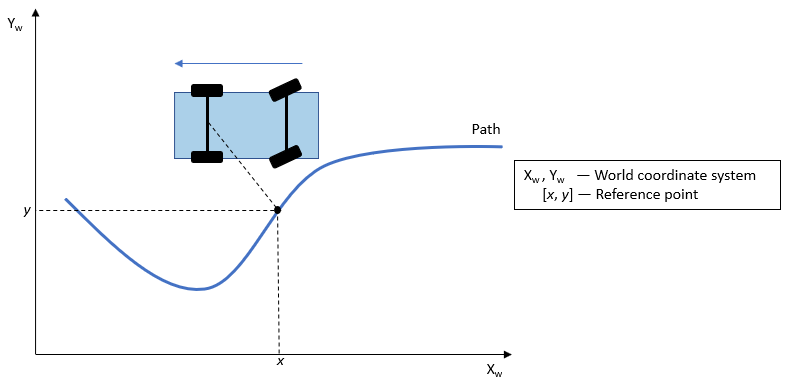
RefPose- 参考姿态
[X,ÿ,Θ]矢量
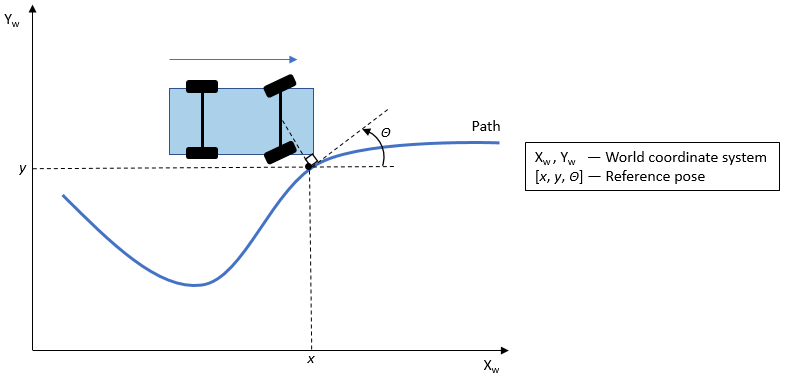
参考姿态,指定为[X,ÿ,Θ)向量。X和ÿ单位是米,和Θ是在度。
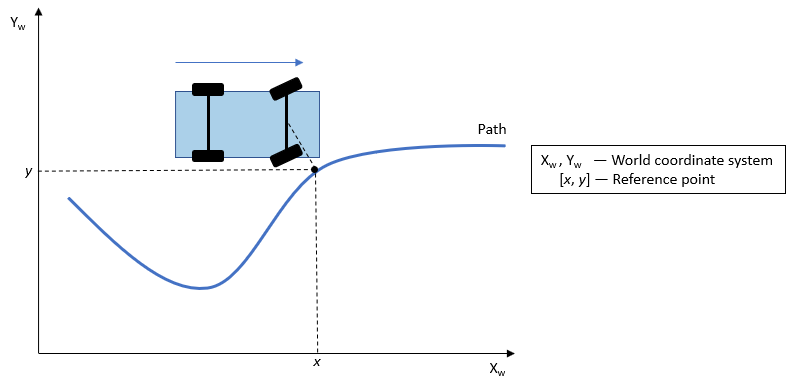
X和ÿ指定参考点,引导车辆转向。Θ指定的路径的取向角在该参考点,并且在逆时针方向上正。
对于前进中的车辆,参考点是最接近车辆前轴中心的路径上的点。
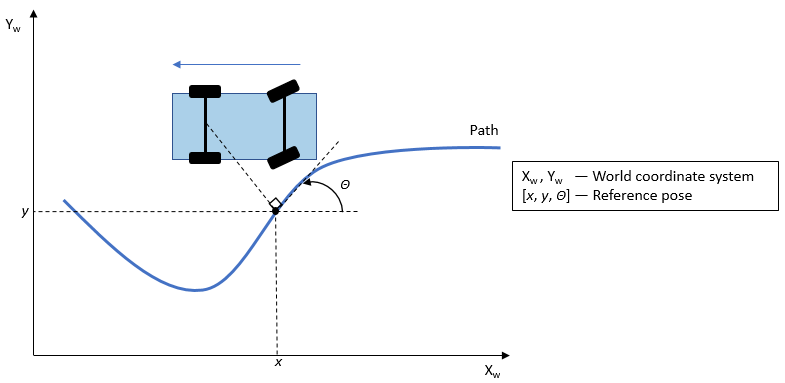
对于反向行驶的车辆,参考点是最接近车辆后轴中心的路径上的点。


数据类型:单|双
CurrPose——当前的姿势
[X,ÿ,Θ]矢量
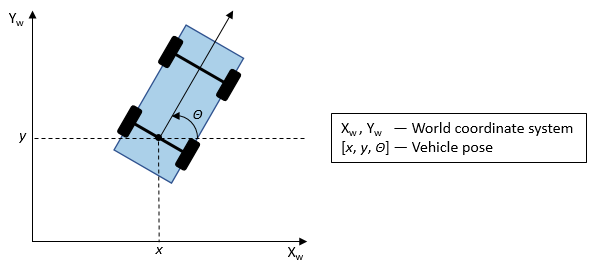
车辆的当前姿态,指定为[X,ÿ,Θ)向量。X和ÿ单位是米,和Θ是在度。
X和ÿ指定车辆的位置,定义为车辆后轴的中心。
Θ确定车辆的位置处的取向角(X,ÿ),并且是在逆时针方向正。
有关车辆姿态的详细信息,请参阅坐标系统在自动驾驶的工具箱。
数据类型:单|双
CurrVelocity- 当前的纵向速度
实标
车辆的当前纵向速度,指定为实数标量。单位是米每秒。
如果车辆是在向前运动,则该值必须大于0。
如果车辆是在反向运动,则此值必须小于0。
值0表示车辆不处于运动状态。
数据类型:单|双
方向- 驾驶车辆的方向
1(移动)|1(反向运动)
在车辆的驾驶方向,指定为1向前运动或1反向运动。驱动方向决定了用于计算转向角指令的位置误差和角度误差。有关详细信息,请参阅算法。
CurrYawRate- 当前偏航率
实标
车辆的当前偏航率,以每秒度数为单位,指定为实标量。当前的偏航率是指飞行器角速度的变化率。
依赖
要启用该端口,设置汽车模型至动态的自行车模型。
CurrSteer-当前舵角
实标

产量
SteerCmd- 转向角指令
实标
参数
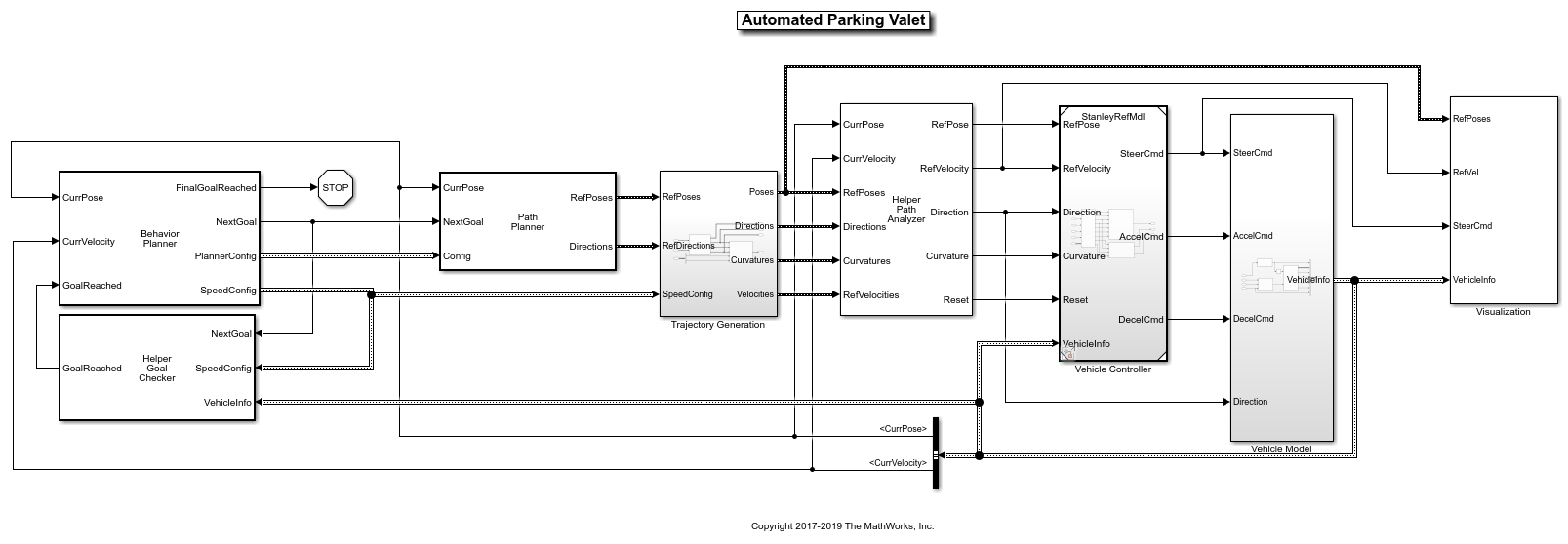
模型的例子
提示
您可以为车辆环境的变化自行车模型之间切换。添加两个横向控制器斯坦利块,并为每个块指定不同的自行车模型。例如,参见横向控制教程。
算法
为了计算转向角命令时,控制器最小化了位置误差和当前姿态相对于基准姿态的角度误差。所述车辆的行驶方向决定这些错误值。
当车辆向前行驶时(方向参数是1):
该位置误差为从前轴中心到路径上参考点的横向距离。
该角误差是前轮相对于参考路径的角度。
当车辆是在反向运动(方向参数是1):
该位置误差是从后轴的路径上的基准点的中心的横向距离。
该角误差是后轮相对于参考路径的角度。
有关控制器如何最大限度地减少这些错误的运动学和动力学模型自行车的详细信息,请参阅[1]。
参考
[1] Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo,和Sebastian Thrun。越野自动汽车轨迹跟踪:控制器设计、实验验证和赛车。美国控制会议。2007年,页。2296年至2301年。DOI:10.1109 / ACC.2007.4282788
扩展功能
介绍了在R2018b
你也可以从以下列表中选择一个网站:
