速度分析器
给定运动限制的车辆路径的生成速度曲线
- 图书馆:
自动化驾驶工具箱
描述
这速度分析器块生成满足这组指定运动约束的驱动路径的速度分布:
沿路径和驱动方向指定累积长度和路径的每个点处的曲率。您可以从输出中获取这些值路径更平滑的样条曲线块。还在路径的开始和结束时指定车辆的纵向速度。
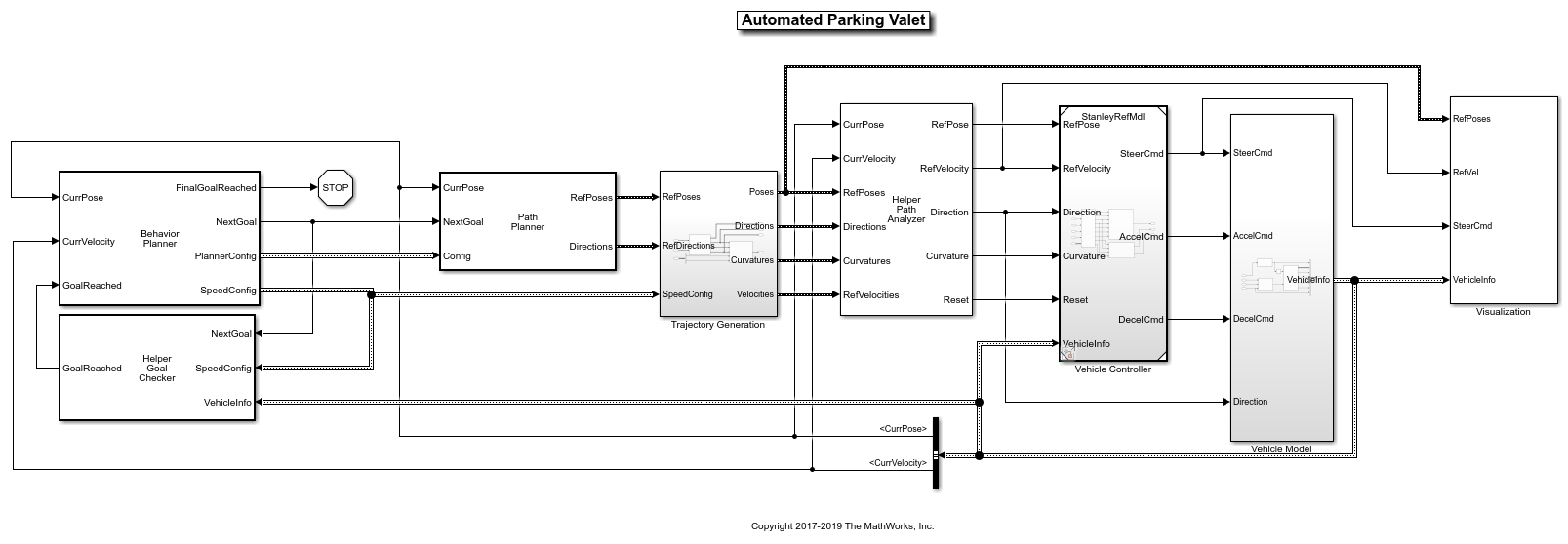
使用生成的速度剖面作为纵向控制器的输入参考速度,如图所示Simulink中的自动化停车剂金宝app的例子。
港口
输入
输出
参数

更多关于
算法
若要生成参考路径的速度剖面,则速度分析器Block执行以下步骤:
生成一个连续的速度剖面,满足由块参数指定的所有运动学约束(速度、加速度和挺直)。
通过将参考路径中的姿态映射到速度值来离散速度剖面,这是基于姿态与起始姿态的距离。属性中指定的累积路径长度CumLengths.输入端口包含这些距离。这路径更平滑的样条曲线块返回这些累积路径长度以及平滑路径。
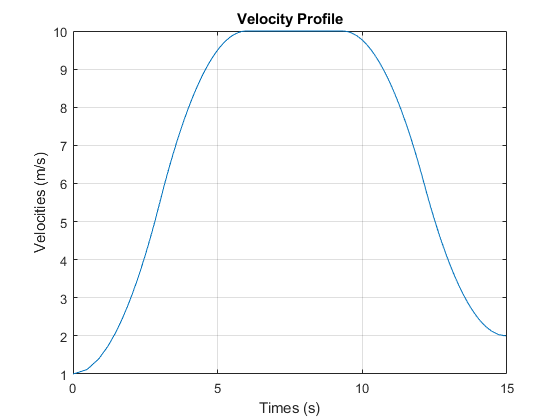
生成的速度曲线是七个间隔曲线。在曲线内的每个时间间隔,车辆的混血,加速度和速度变化以满足指定的约束。图和表显示了这些值如何改变沿着路径前向前行动行驶的车辆。为简单起见,车辆的起始和结束速度,如所指定的StartVelocity和endvelocity.输入端口均为0..

| 时间间隔 | 混蛋 | 加速度 | 速度 | 笔记 |
|---|---|---|---|---|
| 1 | 设置Maxjerk. |
增加0.到maxaccel. |
起始速度增加 | - |
| 2 | 设置0. |
保持常量maxaccel. |
不断增加 | 在前一个间隔期间,如果车辆无法达到maxaccel.鉴于MaxSpeed约束,不发生间隔2。 |
| 3. | 设置-MaxJerk |
减少从maxaccel.到0. |
增加到MaxSpeed |
- |
| 4. | 设置0. |
保持常量0. |
保持常量MaxSpeed |
- |
| 5. | 设置-MaxJerk |
减少从0.到-MaxDecel |
开始减少 | - |
| 6. | 设置0. |
保持常量-MaxDecel |
不断减少 | 在前一个间隔期间,如果车辆无法达到-MaxDecel鉴于MaxSpeed约束,那么间隔6就不会发生。 |
| 7. | 设置Maxjerk. |
增加-MaxDecel到0. |
减少到最终速度 | - |
在图和表中:
Maxjerk.和-MaxJerk由此设定最大纵向混蛋(M / S ^ 3)参数。maxaccel.和-MaxDecel由此设定最大纵向加速度(m / s ^ 2)和最大纵向减速(m/s^2)分别参数。您可以为这些参数指定非对称值。MaxSpeed是由最大允许速度(m/s)参数。
对于反向运动的车辆,图中的曲线颠倒。图中显示的参数值的迹象也会反转。
如果车辆包括方向的多个变化,则块为每个驱动方向产生单独的速度分布。然后块在决赛中串联这些配置文件速度输出。例如,看到曲线和方向变化路径的速度剖面.
参考
[1] Villagra,Jorge,VicenteMilanés,JoshuéPérez和豪尔赫戈约。“自动公共交通工具的平滑道路和速度规划。”机器人技术与自主系统.卷。60,2012年2月2日,第252-265页。
扩展功能
也可以看看
您还可以从以下列表中选择一个网站:
