主要内容
vision.labeler.loading.MultiSignalSource类
包:vision.labeler.loading
超类:matlab.mixin.Heterogeneous
接口加载信号数据到地面真相标签应用程序
描述
的vision.labeler.loading.MultiSignalSource类创建一个接口,用于将信号从数据源加载到地面实况贴标签机数据源可以是文件格式或任何自定义源。
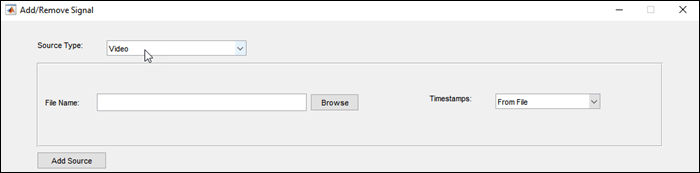
使用这个类创建的接口允许你在应用程序的添加/删除信号对话框中自定义面板来加载自定义数据源。图中显示了一个加载面板的示例。
这个类还提供了从装入的信号中读取帧的接口。应用程序渲染这些框架进行标签。
按照以下步骤定义自定义类以将数据源加载到应用程序中。
创建一个继承自
vision.labeler.loading.MultiSignalSource类。类定义必须具有这种格式,其中customSourceClassclassdefcustomSourceClass < vision.labeler.loading.MultiSignalSource将类保存到这个文件夹中
matlabrootmatlabroot函数。视力视力< matlabroot > \工具箱\ \ \ +视觉\ +贴标签机\ +加载
另外,创建一个
+视觉/ +贴标签机/ +加载将这些文件夹添加到MATLAB的搜索路径中,并将类保存到+视觉/ +贴标签机/ +加载文件夹中。的地面实况贴标签机应用程序识别文件夹中的数据源类只有这个路径。定义将数据源加载到应用程序所需的类属性和方法。该表显示了预定义的自定义类,您可以使用它们作为定义这些属性和方法的起点。
类 由类加载的数据源 查看类源代码的命令 vision.labeler.loading.VideoSource视频文件 编辑vision.labeler.loading.VideoSourcevision.labeler.loading.ImageSequenceSource图像序列的文件夹 编辑vision.labeler.loading.ImageSequenceSourcevision.labeler.loading.VelodyneLidarSource威力登®PCAP文件 编辑vision.labeler.loading.VelodyneLidarSourcevision.labeler.loading.RosbagSourceRosbag文件 编辑vision.labeler.loading.RosbagSourcevision.labeler.loading.PointCloudSequenceSource点云序列文件夹 编辑vision.labeler.loading.PointCloudSequenceSourcevision.labeler.loading.CustomImageSource自定义图像格式 编辑vision.labeler.loading.CustomImageSource有关定义自定义数据源类所需的属性和方法的说明,请参见为加载自定义地面真实数据源创建类的例子。
的vision.labeler.loading.MultiSignalSource类是一个处理类。
属性
方法
另请参阅
应用程序
类
介绍了R2020a
你也可以从以下列表中选择一个网站:
