使用合成雷达和视觉传感器融合数据
这个例子展示了如何生成一个场景,模拟传感器检测,并使用传感器融合跟踪模拟车辆。使用场景生成的主要好处和传感器模拟传感器记录创建罕见的能力和有潜在危险的事件和测试车辆算法。
这个例子涵盖整个编程生成合成数据的工作流。生成合成数据交互,使用驾驶场景设计师应用。例如,明白了创建驾驶场景交互并生成合成传感器数据。
生成的场景
场景生成包含生成道路网络,定义车辆在道路上移动,和移动车辆。
在这个例子中,你的测试能力的传感器融合跟踪车辆通过左边的自我。场景模拟高速公路设置,和额外的车辆在前面和后面的自我。
%定义一个空的场景。场景= drivingScenario;场景。SampleTime = 0.01;
添加一段500米的典型高速公路路有两个车道。路使用的一组定义的点,每个点定义在三维空间的中心。添加一个球衣道路的右边缘的障碍。
roadCenters = [0 0;50 0;100 0;250 20;500年40];mainRoad =路(场景、roadCenters“道”lanespec (2));障碍(场景,mainRoad);
创造自我,三辆车:超越自我,通过它在左边,一个驱动器的驱动后面的车辆和一个自我自我。所有的车沿着轨迹路径点通过使用定义的道路轨迹推动政策。通过汽车将开始在右车道,搬到左边的车道,并返回到右车道。
%创建自我车辆,以沿着路25米/秒。把%在右车道车辆减去半个车道宽度(1.8米)%的中心线的道路。egoCar =车辆(场景中,“ClassID”1);轨迹(egoCar roadCenters 2:,: - 1.8 [0], 25);%在右车道%添加一个车里的自我leadCar =车辆(场景中,“ClassID”1);轨迹(leadCar [70 0;roadCenters (3:,:)] - [0 1.8], 25);%在右车道%添加一个车沿着路以35米/秒的速度传播,并将自我passingCar =车辆(场景中,“ClassID”1);路点= [0 -1.8;50 1.8;100年1.8;250年21.8;400年32.2;500年38.2);轨迹(passingCar锚点35);%自我后面添加一个辆车车chaseCar =车辆(场景中,“ClassID”1);轨迹(chaseCar [25 0;roadCenters (2:,:)] - [0 1.8], 25);%在右车道
定义雷达和视觉传感器
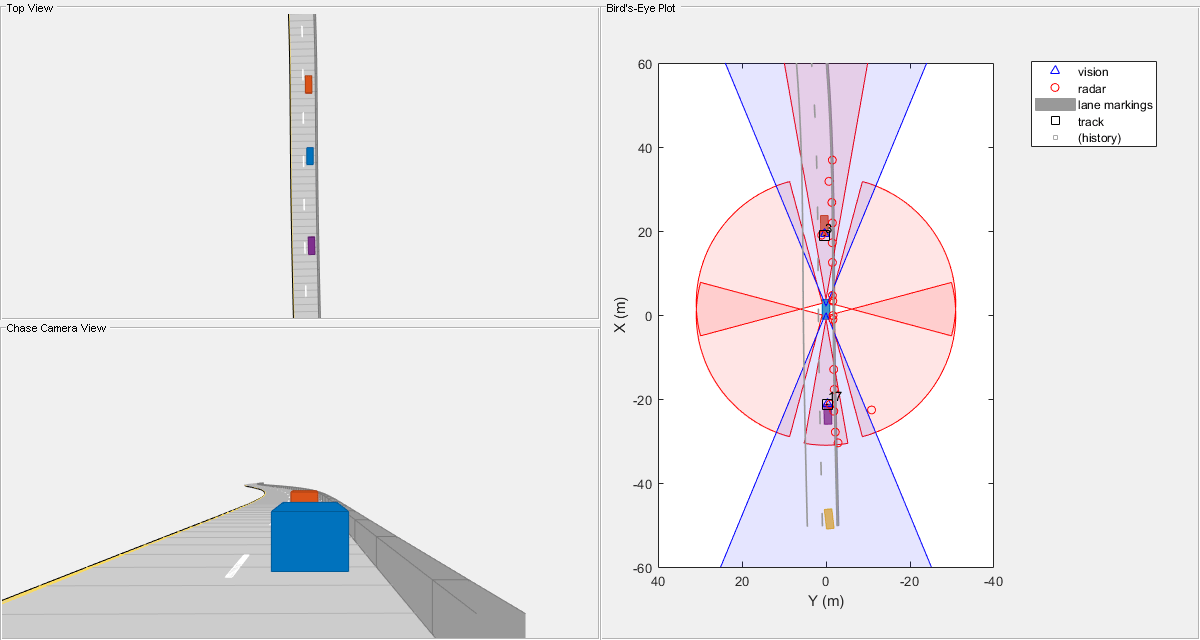
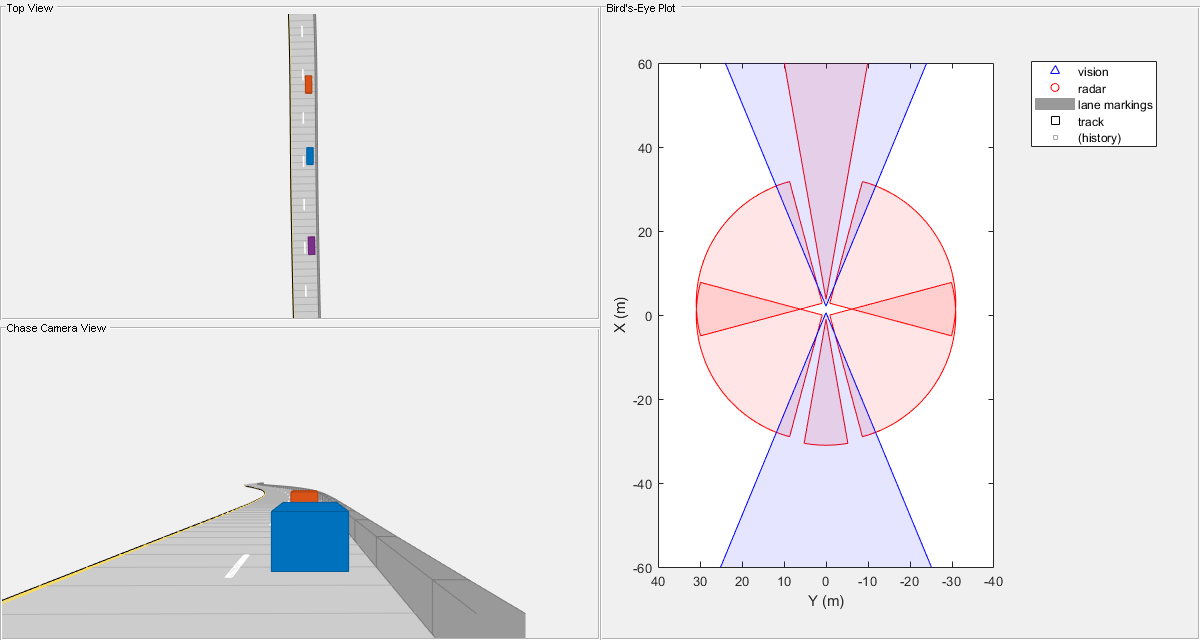
在本例中,您模拟一种自我工具6 2雷达传感器和视觉传感器覆盖360度的视野。传感器有一些重叠和覆盖缺口。自我车辆配备远程雷达传感器和视觉传感器在前面和后面的车辆。两边的车辆有两个短程雷达传感器,每个覆盖90度。一个传感器两侧覆盖从中间的车回来。其他传感器两侧覆盖从车辆的中间。下一节中的图显示了报道。
传感器=细胞(8,1);%前置远程雷达传感器在车的前保险杠的中心。传感器{1}= drivingRadarDataGenerator (“SensorIndex”, 1“RangeLimits”174年[0],…“MountingLocation”,[egoCar。轴距+ egoCar。FrontOverhang, 0, 0.2),“FieldOfView”5],(20日);%后置远程雷达传感器在汽车的后保险杠的中心。传感器{2}= drivingRadarDataGenerator (“SensorIndex”2,“MountingAngles”(180 0 0),…“MountingLocation”,[-egoCar。RearOverhang, 0, 0.2),“RangeLimits”,30 [0],“FieldOfView”5],(20日);% Rear-left-facing短程雷达传感器在车的左后轮好。传感器{3}= drivingRadarDataGenerator (“SensorIndex”3,“MountingAngles”(120 0 0),…“MountingLocation”,[0,egoCar。宽/ 2 0.2),“RangeLimits”,30 [0],“ReferenceRange”,50岁,…“FieldOfView”(90 5),“AzimuthResolution”10“RangeResolution”,1.25);% Rear-right-facing短程雷达传感器,在车的右后轮舱。传感器{4}= drivingRadarDataGenerator (“SensorIndex”4“MountingAngles”(-120 0 0),…“MountingLocation”,[0,-egoCar。宽/ 2 0.2),“RangeLimits”,30 [0],“ReferenceRange”,50岁,…“FieldOfView”(90 5),“AzimuthResolution”10“RangeResolution”,1.25);% Front-left-facing短程雷达传感器在车的左前轮好。{5}= drivingRadarDataGenerator(传感器“SensorIndex”5,“MountingAngles”(60 0 0),…“MountingLocation”,[egoCar。轴距,egoCar。宽/ 2 0.2),“RangeLimits”,30 [0],…“ReferenceRange”,50岁,“FieldOfView”(90 5),“AzimuthResolution”10…“RangeResolution”,1.25);% Front-right-facing短程雷达传感器在正确的汽车的前轮。{6}= drivingRadarDataGenerator(传感器“SensorIndex”6“MountingAngles”(-60 0 0),…“MountingLocation”,[egoCar。轴距,-egoCar。宽/ 2 0.2),“RangeLimits”,30 [0],…“ReferenceRange”,50岁,“FieldOfView”(90 5),“AzimuthResolution”10…“RangeResolution”,1.25);%前置摄像头位于前挡风玻璃。{7}= visionDetectionGenerator(传感器“SensorIndex”7“FalsePositivesPerImage”,0.1,…“SensorLocation”(0.75 * egoCar。轴距0),“高度”,1.1);%后置摄像头位于后方挡风玻璃。传感器{8}= visionDetectionGenerator (“SensorIndex”8“FalsePositivesPerImage”,0.1,…“SensorLocation”(0.2 * egoCar。轴距0),“高度”,1.1,“偏航”,180);%注册演员资料与传感器。概要文件= actorProfiles(场景);为m = 1:元素个数(传感器)如果isa(传感器{m},“drivingRadarDataGenerator”{m})传感器。概要文件=概要;其他的传感器{m}。ActorProfiles =概要;结束结束
创建一个跟踪器
创建一个multiObjectTrackerinitSimDemoFilter金宝app支持函数来初始化一个恒定速度线性卡尔曼滤波器与位置和速度。
在二维跟踪完成。虽然在三维传感器返回测量,运动本身就是局限于水平面,所以没有需要跟踪的高度。
追踪= multiObjectTracker (“FilterInitializationFcn”@initSimDemoFilter,…“AssignmentThreshold”30岁的“ConfirmationThreshold”[4 - 5]);positionSelector = [1 0 0 0;0 0 1 0);%的位置选择器velocitySelector = [0 1 0 0;0 0 0 1);%的速度选择器%创建显示并返回一个句柄鸟瞰的阴谋cep = createDemoDisplay (egoCar、传感器);

模拟的场景
以下循环移动车辆,要求传感器模拟,并执行跟踪。
注意,场景生成和传感器模拟可以有不同的时间步骤。指定不同的场景和时间步长传感器使您能够分离的场景模拟传感器模拟。这是用于建模的演员与高精度运动独立于传感器的测量速度。
另一个例子是当传感器不同的更新率。假设一个传感器提供更新每20毫秒,另一个传感器提供更新每50毫秒。您可以指定一个更新的场景10毫秒和传感器将提供他们的更新在正确的时间。
在这个例子中,场景一代有一个0.01秒的时间步长,而传感器检测每0.1秒。传感器返回一个逻辑国旗,isValidTime如果传感器生成的检测,这是真的。这个标志是用来调用跟踪只有当有检测。
另一个重要的注意的是,传感器可以模拟多个检测每个目标,特别是当目标非常接近雷达传感器。因为追踪假定一个从每个传感器检测每一个目标,你必须集群检测前跟踪过程。这是通过设置TargetReportFormat“集群检测”,这是默认值。传感器模型也可以输出原始检测数据,或者使用内部跟踪器跟踪更新。
toSnap = true;而推进(场景)& & ishghandle (BEP.Parent)%的场景时间= scenario.SimulationTime;%得到其他车辆在自我车辆的位置坐标ta = targetPoses (egoCar);%模拟传感器detectionClusters = {};isValidTime = false (8);为我= 1:8 (sensorDets、numValidDets isValidTime (i)) =传感器{我}(助教、时间);如果numValidDets为j = 1: numValidDets%的视觉检测信噪比不报告。跟踪要求%,他们有相同的对象属性的雷达%检测。这增加了视觉信噪比对象属性%检测和集南。如果~ isfield (sensorDets {j} .ObjectAttributes {1},“信噪比”)sensorDets {j} .ObjectAttributes {1}。信噪比=南;结束% z分量的测量位置和速度%的测量和MeasurementNoise字段sensorDets {j}。测量= sensorDets {j}。测量([1 2 4 5]);sensorDets {j}。MeasurementNoise = sensorDets {j}。MeasurementNoise ([1 2 4 5]、[1 2 4 5]);结束detectionClusters = [detectionClusters;sensorDets];% #好< AGROW >结束结束%更新追踪是否有新的检测如果任何(isValidTime)如果isa(传感器{1},“drivingRadarDataGenerator”传感器)vehicleLength = {1} .Profiles.Length;其他的vehicleLength = {1} .ActorProfiles.Length传感器;结束confirmedTracks = updateTracks(跟踪、detectionClusters、时间);%更新鸟瞰的阴谋updateBEP (cep、egoCar detectionClusters、confirmedTracks positionSelector, velocitySelector);结束%拍图文档当汽车通过自我如果助教(1).Position (1) > 0 & & toSnap toSnap = false;snapnow结束结束
总结
这个例子展示了如何生成一个场景,模拟传感器检测,使用这些检测跟踪车辆行驶车辆的自我。
你可以试着修改场景,或添加或删除车辆。你也可以尝试添加、删除或修改自我车辆上的传感器,或修改跟踪参数。
金宝app支持功能
initSimDemoFilter
该函数初始化一个恒定的速度滤波器基于检测。
函数过滤器= initSimDemoFilter(检测)%使用二维恒定速度模型初始化一个trackingKF过滤器。%的状态向量(x, vx; y; v)%检测测量向量[x, y, vx; v)%结果,测量模型是H = [1 0 0 0;0 0 1 0;0 1 0 0;0 0 0 1)H = [1 0 0 0;0 0 1 0;0 1 0 0;0 0 0 1);过滤器= trackingKF (“MotionModel”,“二维恒定速度”,…“状态”,H * detection.Measurement…“MeasurementModel”H,…“StateCovariance”,H *检测。MeasurementNoise * H,…“MeasurementNoise”,detection.MeasurementNoise);结束
createDemoDisplay
这个函数创建一个三片式显示:
左上角显示:认为遵循自我的工具。
左下侧的角落显示:chase-camera认为遵循自我的工具。
右半边的显示:A
birdsEyePlot
函数cep = createDemoDisplay (egoCar、传感器)%崭露头角hFigure =图(“位置”,(0,0,1200,640),“名字”,的传感器融合与合成数据的例子);movegui (hFigure [0, 1]);%移动左边的图,从上往下一点%添加一个汽车遵循自我车辆从背后的阴谋hCarViewPanel = uipanel (hFigure,“位置”[0 0 0.5 - 0.5),“标题”,“追逐相机视图”);hCarPlot =轴(hCarViewPanel);chasePlot (egoCar“父”,hCarPlot);%添加一个汽车的阴谋,从顶视图遵循自我的工具hTopViewPanel = uipanel (hFigure,“位置”[0 0.5 0.5 0.5],“标题”,顶视图的);hCarPlot =轴(hTopViewPanel);chasePlot (egoCar“父”hCarPlot,“ViewHeight”,130,“ViewLocation”[0 0],“ViewPitch”,90);%添加面板一个鸟瞰的阴谋hBEVPanel = uipanel (hFigure,“位置”(0.5 0 0.5 - 1),“标题”,“鸟”眼中的阴谋”);%为自我创造鸟瞰的阴谋车辆和传感器覆盖hBEVPlot =轴(hBEVPanel);frontBackLim = 60;cep = birdsEyePlot (“父”hBEVPlot,“Xlimits”,(-frontBackLim frontBackLim),“Ylimits”35 [-35]);%绘制雷达的覆盖区域为我= 1:6帽= coverageAreaPlotter (cep,“FaceColor”,“红色”,“EdgeColor”,“红色”);如果isa(传感器{我},“drivingRadarDataGenerator”)plotCoverageArea(帽、传感器{我}.MountingLocation (1:2),…{我}.RangeLimits传感器(2)、传感器{我}.MountingAngles(1),{我}.FieldOfView传感器(1));其他的plotCoverageArea({我}.SensorLocation帽,传感器,…传感器{我}。{我}MaxRange,传感器。{我}.FieldOfView偏航,传感器(1));结束结束%绘制视觉传感器的覆盖区域为我= = coverageAreaPlotter七8帽(cep),“FaceColor”,“蓝”,“EdgeColor”,“蓝”);如果isa(传感器{我},“drivingRadarDataGenerator”)plotCoverageArea(帽、传感器{我}.MountingLocation (1:2),…{我}.RangeLimits传感器(2)、传感器{我}.MountingAngles (1), 45);其他的plotCoverageArea({我}.SensorLocation帽,传感器,…传感器{我}。{我}MaxRange,传感器。偏航、45);结束结束%创建一个视觉检测绘图机把它放在一个结构体,以供将来使用detectionPlotter (cep“DisplayName的”,“愿景”,“MarkerEdgeColor”,“蓝”,“标记”,“^”);%将所有雷达探测到一个条目并将其存储为以后更新detectionPlotter (cep“DisplayName的”,“雷达”,“MarkerEdgeColor”,“红色”);%添加道路边界的阴谋laneMarkingPlotter (cep“DisplayName的”,“车道标记”);%将歌曲添加到鸟瞰的阴谋。显示最后10跟踪更新。trackPlotter (cep“DisplayName的”,“跟踪”,“HistoryDepth”10);轴(BEP.Parent“平等”);xlim (cep)。家长,[-frontBackLim frontBackLim]);ylim (cep)。家长,40 [-40]);%为地面实况添加大纲绘图仪outlinePlotter (cep“标签”,“地面实况”);结束
updateBEP
这个函数更新鸟瞰的情节与道路边界,检测和跟踪。
函数updateBEP (cep egoCar,检测、confirmedTracks psel, vsel)%更新道路边界及其显示(lmv, lmf) = laneMarkingVertices (egoCar);plotLaneMarking (findPlotter (cep),“DisplayName的”,“车道标记”)、lmv lmf);%更新地面实况数据(位置、偏航、长度、宽度、originOffset color] = targetOutlines (egoCar);plotOutline (findPlotter (cep),“标签”,“地面实况”)、位置、偏航、长度、宽度、“OriginOffset”originOffset,“颜色”、颜色);%更新障碍数据[bPosition, bYaw bLength、bWidth bOriginOffset, bColor, numBarrierSegments] = targetOutlines (egoCar,“障碍”);plotBarrierOutline (findPlotter (cep),“标签”,“地面实况”)、numBarrierSegments bPosition、bYaw bLength, bWidth,…“OriginOffset”bOriginOffset,“颜色”,bColor);%准备和更新检测显示N =元素个数(检测);detPos = 0 (N, 2);isRadar = true (N, 1);为i = 1: N detPos(我:)=检测{我}.Measurement (1:2)”;如果检测我{}。SensorIndex > 6%的视觉检测isRadar (i) = false;结束结束plotDetection (findPlotter (cep),“DisplayName的”,“愿景”),detPos (~ isRadar,:));plotDetection (findPlotter (cep),“DisplayName的”,“雷达”),detPos (isRadar:));%删除所有对象追踪不明的视觉检测%发电机之前更新跟踪显示。这些有ObjectClassID%参数值为0,包括对象等障碍。isNotBarrier = arrayfun (@ (t) t.ObjectClassID confirmedTracks) > 0;confirmedTracks = confirmedTracks (isNotBarrier);%准备和更新跟踪显示trackIDs = {confirmedTracks.TrackID};标签= cellfun (@num2str trackIDs,“UniformOutput”、假);[tracksPos, tracksCov] = getTrackPositions (confirmedTracks psel);tracksVel = getTrackVelocities (confirmedTracks vsel);plotTrack (findPlotter (cep),“DisplayName的”,“跟踪”)、tracksPos tracksVel tracksCov,标签);结束