Ctroctcorners.
恒定匝速矩形目标的拐角测量
描述
例子
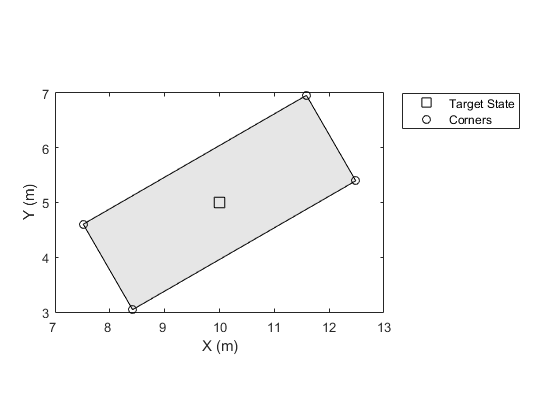
传感器参考框架中的角落位置
通过指定来定义传感器参考帧传感器参数输入。
SensorPosition = [-5; 10; 0];SensorOrientation = Rotmat(四元度([30 0 0],'eulerd'那'Zyx'那'框架'),'框架');SensorParams = struct('框架'那'长方形'那......'originposition',传感器,......'方向',senserorientation);
定义矩形目标的恒定转符状态。
状态= [10; 5; 1.6; 30; 0.5; 4.7; 1.8];
计算传感器参考帧中的角落位置。
角落= CtrectCorners(州,SensorParams);
使用可视化环境Theaterplot.。
%创建一个剧院情节。tp = theaterplot;%使用轨道绘图仪绘制状态。lateplotter = trackplotter(tp,'显示名称'那'目标状态');%使用检测绘图仪绘制角落。CornerPlotter = DetectionPlotter(TP,'显示名称'那'角落');
计算输入和绘图。
targetpos = [状态(1)状态(2)0];目标=罗马特(四元数([州(4)0 0],'eulerd'那'Zyx'那'框架'),'框架');targetdims = struct('长度',州(6),......'宽度',州(7),......'高度',5,......'OriginOffset',[0 0 0]);cornerposglobal = sensororientation *角落(:, :) + sensorPosition;atalyplotter.plottrack(targetpos,targetdims,目标);Cornerplotter.plotdetection(cornerposglobal');
输入参数
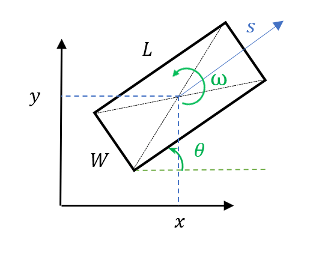
状态-当前的矩形目标状态
7 - 逐个 -N实验矩阵
当前的矩形目标状态,指定为7-by-N真实值的矩阵,在哪里N是州的数量。七维矩形状态定义为[X;y;S.;θ.;ω.;L.;W.]。这些变量及其单位的含义是:
| 多变的 | 意义 | 单元 |
| X | 矩形中心的位置X方向 |
m |
| y | 矩形中心的位置y方向 |
m |
| S. | 标题方向的速度 |
小姐 |
| θ. | 矩形的定向角度相对于X方向 |
程度 |
| ω. | 轮率 |
学位 |
| L. | 长度的矩形 |
m |
| W. | 矩形的宽度 |
m |
例子:[1; 2; 2; 30; 1; 4.7; 1.8]
数据类型:单身的|双倍的
传感器参数-传感器变换功能的参数
结构体|一系列结构
传感器变换功能的参数,作为结构或结构阵列返回。如果您只需要一次转换状态,请将其指定为结构。如果您需要改变国家N时间,将其指定为N-1个结构阵列。例如,为了将状态从方案帧转换到传感器帧,您通常需要首先将状态从方案矩形帧转换为平台矩形框架,然后将状态从平台矩形框架转换为传感器球框架。
结构的领域是:
| 场地 | 描述 |
框架 |
子坐标框类型,指定为 |
originosition. |
子帧起源位置在父帧中表达,指定为3×1向量。 |
originvelocity. |
在父帧中表示的子帧原点速度,指定为3×1向量。 |
方向 |
帧之间的相对取向,指定为3×3旋转矩阵。如果是 |
Isparenttochild. |
标志表示父母和子帧之间的旋转方向,指定为 |
hasazimuth. |
指示输出是否包含指定的方位角组件 |
haselevation. |
指示输出是否包含升高组件,指定为 |
hasrange. |
指示输出是否包含范围组件,指定为 |
哈佛尼度 |
指示输出是否包含速度分量,指定为 |
注意,这里的场景帧是平台帧的父帧,并且平台帧是传感器帧的父帧。
什么时候框架是'长方形'那哈佛尼度确定测量是否以[X;y;Z.;V.X;V.y;V.Z.] 或者 [X;y;Z.]。
什么时候框架是'球形',返回的测量值按[方位角,高程,范围,范围]的顺序。返回测量的元素由以下内容确定:
hasazimuth.- 确定输出是否包含方位角测量。haselevation.- 确定输出是否包含高度测量。hasrange.- 确定输出是否包含范围测量。哈佛尼度- 确定输出是否包含根据条件的范围测量值hasrange.是'真的'。如果hasrange.是'错误的',返回的测量不包含范围速率(即使哈佛尼度是'真的')。
数据类型:塑造
输出参数
扩展能力
您还可以从以下列表中选择一个网站: