主要内容
initctrectgmphd
创造恒定的转角率矩形目标gmphd过滤器
描述
博士学位= initctrectgmphd (检测)gmphd基于目标检测中提供的信息进行筛选,检测.该函数初始化一个具有相同惯例的恒转率矩形状态ctrect和ctrectmeas, (x;y;年代;θ;ω;l;W].看到算法这些变量的意义。
.
请注意
此初始化函数不兼容trackerGNN,trackerJPDA,trackerTOMHT系统对象。
例子
输入参数
输出参数
算法
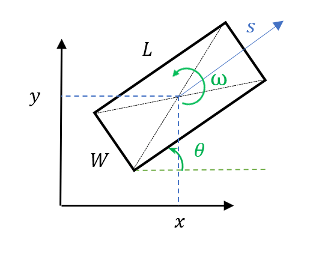
矩形目标状态
矩形目标状态包含[x;y;年代;θ;ω;l;W]:
| 变量 | 意义 | 单位 |
| x | 矩形中心的位置x方向 |
米 |
| y | 矩形中心的位置y方向 |
米 |
| 年代 | 速度在前进方向 |
米/秒 |
| θ | 矩形的方位角x方向 |
学位 |
| ω | 周转周期 |
度/秒 |
| l | 矩形的长度 |
米 |
| W | 矩形的宽度 |
米 |
扩展功能
另请参阅
gmphd|trackerPHD|initcagmphd|initctgmphd|ctrect|ctrectmeas|ctrectmeasjac|ctrectjac|initctrectgmphd|ctrectcorners
介绍了R2019b
您也可以从以下列表中选择一个网站: