主要内容
ctrectmeas.
恒定匝速矩形目标测量模型
描述
例子
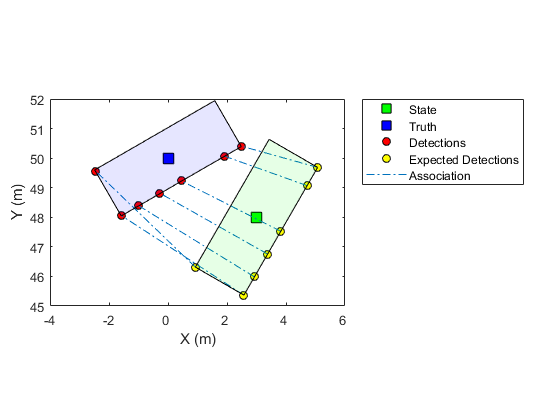
使用矩形测量模型的预期检测
从矩形目标加载检测和真理。
加载('rectangulartargetdetections.mat'那'检测'那'判守');
从目标的矩形状态和实际检测生成预期检测ctrectmeas.。
tgtstate = [3; 48; 0; 60; 0; 5; 1.9];zexp = ctrectmeas(tgtstate,检测);
使用可视化环境Theaterplot.。
theaterp = theaterplot;StateP = Trackplotter(Theaterp,'显示名称'那'状态'那'markerfacecolor'那'G');TruthP = Trackplotter(Theaterp,'显示名称'那'真相'那'markerfacecolor'那'B');Detp = DetectionPlotter(Theaterp,'显示名称'那'检测'那'markerfacecolor'那'r');Expdetp = DetectionPlotter(Theaterp,'显示名称'那'预期的检测'那'markerfacecolor'那'是');l =传奇(Theaterp.Parent);l.autoupdate =.'上';抓住上;赋值= plot(theaterp.parent,nan,nan,' - 。'那'显示名称'那'协会');
绘制实际和预期的检测。
indets = [检测{:}];Inmeas = Horzcat(Indets.measurent);detp.plotdetection(Inmeas');zexpplot =重塑(zexp,3,[]);Expdetp.plotdetection(Zeppplot');
绘图协会线条。
Zlines = NaN(2,Numir(检测)* 3);zlines(1,1:3:end)= zexpplot(1,:);zlines(2,1:3:结束)= zexpplot(2,:);zlines(1,2:3:结束)= Inmeas(1,:);zlines(2,2:3:结束)= Inmeas(2,:);Assegnp.xdata = zlines(1,:);AssegnP.ydata = zlines(2,:);
情节真理和国家。
真相= [判守(1:2); 0];TraceDims = struct('长度',判处(6),......'宽度',判守(7),......'高度',0,......'OriginOffset',[0 0 0]);律法=四元数([TruteState(4)0 0],'eulerd'那'Zyx'那'框架');真相.Plottrack(Theervepos',Threatdims,犹豫);extendpos = [tgtstate(1:2); 0];stateims = struct('长度',tgtstate(6),......'宽度',tgtstate(7),......'高度',0,......'OriginOffset',[0 0 0]);职位=四元数([tgtstate(4)0 0],'eulerd'那'Zyx'那'框架');StateP.plottrack(Questpos',Stateims,职位);
输入参数
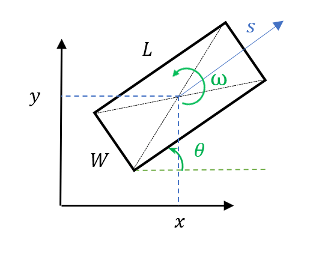
状态-当前的矩形状态
7 - 逐个 -N实验矩阵
当前矩形状态,指定为7-by-N真实值的矩阵,在哪里N是州的数量。七维矩形目标状态定义为[X;y;S.;θ.;ω.;L.;W.]:
| 多变的 | 意义 | 单元 |
| X | 矩形中心的位置X方向 |
m |
| y | 矩形中心的位置y方向 |
m |
| S. | 标题方向的速度 |
小姐 |
| θ. | 矩形的定向角度相对于X方向 |
程度 |
| ω. | 轮率 |
学位 |
| L. | 长度的矩形 |
m |
| W. | 矩形的宽度 |
m |
例子:[1; 2; 2; 30; 1; 4.7; 1.8]
数据类型:单身的|双倍的
检测-目标检测
1-by-m细胞阵列ObjectDetection.对象
目标的检测,指定为1-by-m细胞阵列ObjectDetection.对象。这测量参数所有对象的属性(指定来自状态空间的转换为测量空间)对于单元格数组中的所有检测,必须相同。
输出参数
扩展能力
在R2019B中介绍
您还可以从以下列表中选择一个网站: