trackerJPDA
联合概率数据关联跟踪
描述
的trackerJPDA系统对象™是一个跟踪器能够处理来自多个传感器的多个目标的检测。跟踪器使用联合概率数据关联分配每个跟踪检测。跟踪器适用于软任务在多个检测可以为每个轨道。初始化跟踪,确认,纠正,预测(执行惯性),和删除的痕迹。输入生成的跟踪检测报告<一个href="//www.tatmou.com/help/fusion/ref/objectdetection.html">objectDetection,<一个href="//www.tatmou.com/help/fusion/ref/fusionradarsensor-system-object.html">fusionRadarSensor,<一个href="//www.tatmou.com/help/fusion/ref/irsensor-system-object.html">irSensor,或<一个href="//www.tatmou.com/help/fusion/ref/sonarsensor-system-object.html">sonarSensor对象。跟踪估计状态向量和状态估计误差协方差矩阵为每一个轨道。每个检测是分配到至少一个跟踪。如果发现不能分配给任何现有的跟踪,跟踪器创建一个新的轨道。
任何新的追踪从一开始试探性的状态。如果足够的检测是分配给一个试探性的轨道,它的状态改变确认(见ConfirmationThreshold属性)。如果发现已经有一个已知的分类(即。,ObjectClassID返回的跟踪领域非零),相应的跟踪确认。当跟踪确认,追踪认为代表一个物理对象的跟踪。如果检测不分配给跟踪在一个指定的数量的更新,删除。
您可以启用通过指定不同的JPDA跟踪模式<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda-system-object.html" class="intrnllnk">TrackLogic和<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda-system-object.html" class="intrnllnk">MaxNumEvents属性。
设置<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda-system-object.html" class="intrnllnk">TrackLogic财产
“集成”使联合集成数据协会(JIPDA)追踪,追踪确认和删除是基于跟踪的可能性存在。设置<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda-system-object.html" class="intrnllnk">MaxNumEvents财产有限整数使k-best联合集成数据协会(k-best JPDA)跟踪器,每个集群生成一个k的最大事件。
使用这个对象跟踪目标:
创建
trackerJPDA对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的<一个href="//www.tatmou.com/help/matlab/matlab_prog/what-are-system-objects.html" class="a">系统对象是什么?
创建
描述
跟踪器= trackerJPDAtrackerJPDA系统对象的默认属性值。
跟踪器= trackerJPDA (名称,值)trackerJPDA (FilterInitializationFcn, @initcvukf MaxNumTracks, 100)创建一个多目标跟踪器,使用常速,无味卡尔曼滤波器,并允许最多100张光碟。在报价附上每个属性的名字。
属性
使用
过程检测和更新,电话追踪的论点,就好像它是一个函数(这里描述)。
语法
描述
confirmedTracks=跟踪器(<一个href="#mw_81a916cd-b7ae-4e99-8ae2-e81a544adc01" class="intrnllnk">检测,<一个href="#sysobj_tracker_jpda_sep_mw_e1317a82-d69c-41a6-a73e-03809968aff8" class="intrnllnk">时间)时间。
confirmedTracks=跟踪器(<一个href="#mw_81a916cd-b7ae-4e99-8ae2-e81a544adc01" class="intrnllnk">检测,<一个href="#sysobj_tracker_jpda_sep_mw_e1317a82-d69c-41a6-a73e-03809968aff8" class="intrnllnk">时间,<一个href="#mw_7842d596-1c50-4759-9d6c-12c919b796d3" class="intrnllnk">costMatrix)
要启用这种语法,设置HasCostMatrixInput财产真正的。
confirmedTracks=跟踪器(___,<一个href="#mw_4c24db32-8c06-499d-b3c9-a559956a32cb" class="intrnllnk">detectableTrackIDs)detectableTrackIDs。这个参数可用于任何以前的输入语法。
要启用这种语法,设置HasDetectableTrackIDsInput财产真正的。
(<一个href="#sysobj_tracker_jpda_sep_mw_50ddd73c-5a0e-4c3f-aeae-ae169b2a1ae4" class="intrnllnk">返回一个初步跟踪列表和所有歌曲的列表。您可以使用任何输入参数的前面的语法。confirmedTracks,<一个href="#sysobj_tracker_jpda_sep_mw_53235a2d-4540-463a-b589-a5bf13dbc6c7" class="intrnllnk">tentativeTracks,<一个href="#sysobj_tracker_jpda_sep_mw_f8d81000-3499-493d-a597-c9f627ee803e" class="intrnllnk">allTracks)=跟踪器(___)
(<一个href="#sysobj_tracker_jpda_sep_mw_50ddd73c-5a0e-4c3f-aeae-ae169b2a1ae4" class="intrnllnk">也回报分析信息,可用于追踪分析。您可以使用任何输入参数的前面的语法。confirmedTracks,<一个href="#sysobj_tracker_jpda_sep_mw_53235a2d-4540-463a-b589-a5bf13dbc6c7" class="intrnllnk">tentativeTracks,<一个href="#sysobj_tracker_jpda_sep_mw_f8d81000-3499-493d-a597-c9f627ee803e" class="intrnllnk">allTracks,<一个href="#mw_deb21687-bb96-4709-baa4-1ccd04a297ba" class="intrnllnk">analysisInformation)=跟踪器(___)
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
使用trackerJPDA跟踪两个对象
构造一个trackerJPDA对象和一个默认的恒定速度扩展卡尔曼滤波和“历史”跟踪逻辑。集AssignmentThreshold100允许共同跟踪相关。
追踪= trackerJPDA (“TrackLogic”,“历史”,“AssignmentThreshold”,100,…“ConfirmationThreshold”[4 - 5],…“DeletionThreshold”10 [10]);
指定的初始位置和速度两个对象。
pos_true = [0 0;40 -40;0 0];V_true = 5 * (cosd (-30) cosd (30);信德(-30)信德(30);0 0];
创建一个戏剧情节可视化跟踪和检测。
tp = theaterPlot (“XLimits”150年[1],“YLimits”,50 [-50]);trackP = trackPlotter (tp,“DisplayName的”,“跟踪”,“MarkerFaceColor”,‘g’,“HistoryDepth”,0);detectionP = detectionPlotter (tp,“DisplayName的”,“检测”,“MarkerFaceColor”,“r”);
![]()
获取位置和速度,位置和速度选择器。
positionSelector = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 0 0);% (x, y, 0)velocitySelector = [0 1 0 0 0 0;0 0 0 1 0 0;0 0 0 0 0 0);% (vx v 0)
更新的跟踪检测,显示成本和边际概率协会信息,可视化跟踪与检测。
dt = 0.2;为时间= 0:dt: 30%更新对象的真实位置。pos_true = pos_true + V_true * dt;%创建两个对象的检测与噪音。检测(1)= objectDetection(时间、pos_true (: 1) + 1 * randn (3,1));检测(2)= objectDetection(时间,pos_true (:, 2) + 1 * randn (3,1));%一步通过时间和跟踪检测。[alltracks,证实,初步信息]=追踪(检测、时间);%提取位置,速度和标签信息。(pos机,x) = getTrackPositions(证实,positionSelector);韦尔= getTrackVelocities(证实,velocitySelector);量=猫(2,detection.Measurement);detection.MeasurementNoise measCov =猫(3日);%更新情节如果有任何痕迹。如果标签元素个数(确认)> 0 = arrayfun (@ (x) num2str ([x.TrackID]),确认,“UniformOutput”、假);trackP.plotTrack (pos、或者、浸、标签);结束measCov detectionP.plotDetection(量);drawnow;%显示每八的成本和边际概率分布%秒。如果时间> 0 & & mod(时间,8)= = 0 disp ([“在时间t = 'num2str(时间)“秒”,]);disp (的任务是:成本)disp (info.CostMatrix);disp ([集群的数量:num2str(元素个数(info.Clusters))));如果元素个数(info.Clusters) = = 1 disp (的两个轨道在同一集群”。)disp (的边际概率协会:“)disp (info.Clusters {1} .MarginalProbabilities)结束disp (“- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -”)结束结束
在时间t = 8秒,
分配的成本是:
1.0 e + 03 * 0.0020 1.1523 1.2277 0.0053
集群的数量:2
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
在时间t = 16秒,
分配的成本是:
1.3968 4.5123 2.0747 1.9558
集群的数量:1
两轨道在同一集群。
协会的边际概率:
0.8344 0.1656 0.1656 0.8344 0.0000 0.0000
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
在时间t = 24秒,
分配的成本是:
1.0 e + 03 * 0.0018 1.2962 1.2664 0.0013
集群的数量:2
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
![]()
算法
可行联合事件
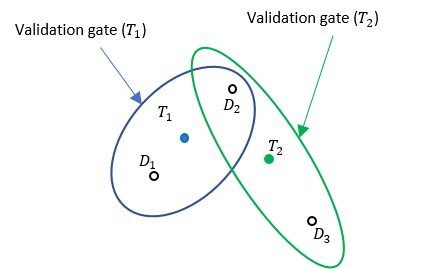
在典型的工作流跟踪系统,追踪需要确定检测可以与任何现有的痕迹。如果追踪者只维护一个跟踪,任务可以通过评估验证门在预测如果测量中测量和决定验证门。在测量空间,验证门是一个空间边界,如二维椭圆或三维椭球,集中在预测的测量。验证门使用概率定义的信息(例如,状态估计和协方差)现有的轨道,这样正确的或理想的检测有很高的可能性(例如,97%概率)在此验证门。
然而,如果一个跟踪维护多个追踪,数据关联过程变得更加复杂,因为一个检测可以属于多个轨道的验证盖茨。例如,在下图中,跟踪T1和T2积极维护跟踪,和他们每个人都有自己的验证。自检测D2盖茨的交叉验证的T1和T2,这两个轨道(T1和T2)相连,形成一个集群。集群是一组连接跟踪及其相关检测。
代表关联关系在一个集群中,验证矩阵是常用的。校验矩阵的每一行对应一个检测,而每一列对应一个跟踪。占每个检测的可能性被杂物,添加第一列,通常称为“跟踪0”或T0。如果检测D我在验证跟踪门Tj,(我,j+ 1)验证矩阵的条目是1。否则,它是零。集群所示图,验证矩阵Ω
注意所有Ω的第一列中的元素是1,因为任何检测可以混乱或假警报。逻辑中的一个重要步骤的联合概率数据关联(JPDA)是获取所有可行的独立联合事件在一个集群中。两个假设可行联合事件:
检测不能发出多个轨道。
轨道传感器无法检测到不止一次的在一个单一的扫描。
根据这两个假设,可以制定可行联合事件(fj)。每个FJE映射到一个FJE矩阵Ωp从最初的验证矩阵Ω。例如,验证矩阵Ω,八FJE矩阵可以得到:
作为一个直接后果的两个假设,Ωp矩阵每一行有一个“1”价值。此外,除了第一列映射到杂物,最多可以有每列的一个“1”。当连接跟踪数量的增长在一个集群中,FJE数量的增加迅速。的jpdaEvents函数使用一个有效的深度优先搜索算法来生成所有可行联合事件矩阵。
引用
[1]Fortmann, T。,Y. Bar-Shalom, and M. Scheffe. "Sonar Tracking of Multiple Targets Using Joint Probabilistic Data Association."IEEE海洋工程》杂志上。第三卷。8日,1983年,页173 - 184。
[2]Musicki D。,和R。Evans. "Joint Integrated Probabilistic Data Association: JIPDA."IEEE航空航天和电子系统。40卷,3号,2004年,页1093 - 1099。