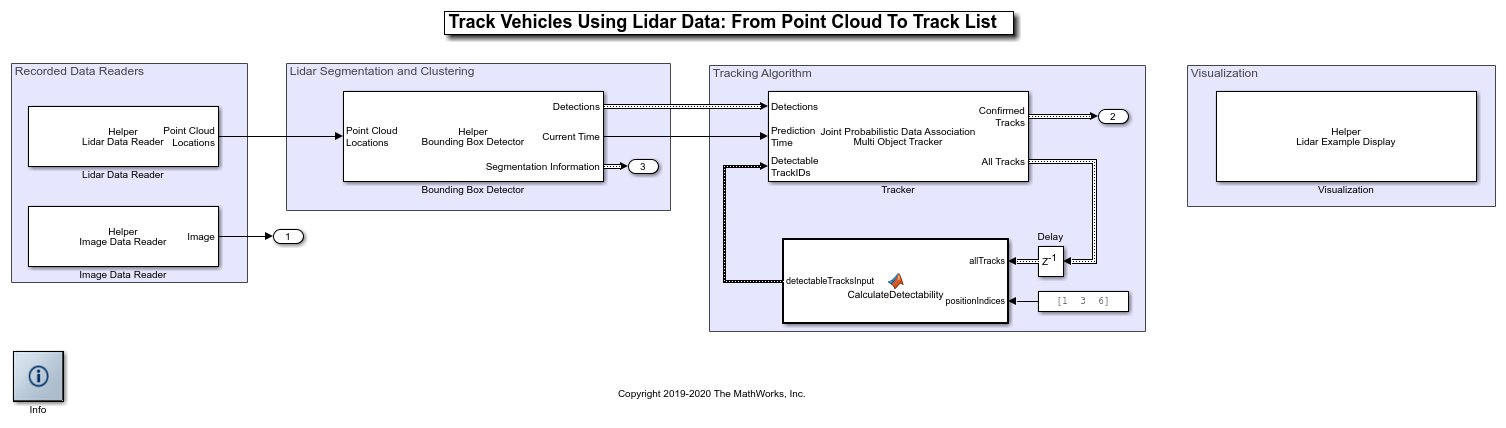
联合概率数据关联多对象追踪
库:
传感器融合和跟踪工具箱/多目标跟踪算法
描述
的联合概率数据关联多对象追踪块能够处理来自多个传感器的多个目标的检测。跟踪器使用联合概率数据关联分配每个跟踪检测。跟踪器适用于软任务,多个检测有助于每个轨道。初始化跟踪,确认,纠正,预测(执行惯性),和删除的痕迹。跟踪估计状态向量和状态估计误差协方差矩阵为每一个轨道。每个检测是分配到至少一个跟踪。如果发现不能分配给任何现有的跟踪,跟踪器创建一个新的轨道。
您可以启用通过指定不同的JPDA跟踪模式类型的跟踪确认和删除逻辑和的k值k-best JPDA参数。
设置类型的跟踪确认和删除逻辑参数
“集成”使联合集成数据协会(JIPDA)追踪,追踪确认和删除是基于跟踪的可能性存在。设置的k值k-best JPDA有限整数参数启用k-best联合集成数据协会(k-best JPDA)跟踪器,每个集群生成一个k的最大事件。
任何新的追踪从一开始试探性的状态。如果足够的检测是分配给一个试探性的轨道,它的状态改变确认。如果发现已经有一个已知的分类(ObjectClassID返回的跟踪领域非零),相应的跟踪确认。当跟踪确认,追踪认为代表一个物理对象的跟踪。如果检测不分配给跟踪在一个指定的数量的更新,删除。
港口
输入
检测- - - - - -检测列表
金宝app®总线包含MATLAB®结构
检测列表,指定为包含一个MATLAB仿真软件总线结构。金宝app结构形式:
| 场 | 描述 | 类型 |
|---|---|---|
NumDetections |
数量的检测 | 整数 |
检测 |
对象检测 | 的数组objectDetection结构。第一个NumDetections这些检测都是实际的检测。 |
领域的检测:
| 场 | 描述 | 类型 |
|---|---|---|
时间 |
测量时间 | 单或双 |
测量 |
对象的测量 | 单或双 |
MeasurementNoise |
测量噪声协方差矩阵 | 单或双 |
SensorIndex |
传感器的惟一ID | 单或双 |
ObjectClassID |
对象分类ID | 单或双 |
MeasurementParameters |
参数初始化函数所使用的跟踪滤波器 | 金宝app仿真软件总线 |
ObjectAttributes |
额外的信息传递给跟踪 | 金宝app仿真软件总线 |
看到<一个href="//www.tatmou.com/help/fusion/ref/objectdetection.html">objectDetection这些字段的详细解释。
请注意
包含一个对象检测结构时间字段。每个对象的时间标记检测的时间必须小于或等于当前块的调用。时间标记也必须大于之前的调用中指定的更新时间。
预测的时间- - - - - -跟踪更新的时间
真正的标量
跟踪更新时间,指定为一个真正的标量在几秒钟内。跟踪更新所有的追踪。每次调用的更新时间必须增加。更新时间必须至少与最大的一样大时间中指定的检测输入端口。
如果没有启用端口,由仿真软件仿真时钟管理决定了更新的时间。金宝app
依赖关系
要启用这个端口,在端口设置选项卡,设置预测时间源来输入端口。
成本矩阵- - - - - -成本矩阵
实值Nt——- - - - - -Nd矩阵
成本矩阵,指定为一个实值Nt——- - - - - -Nd矩阵,Nt是现有的跟踪和数量吗Nd是当前检测的数量。
成本矩阵的行对应于现有的跟踪。列对应的检测。跟踪命令是他们的歌曲出现在列表中所有的歌曲之前调用的输出端口。
在第一个更新跟踪器,或者跟踪没有以前的跟踪,成本分配矩阵的大小[0,Nd]。必须计算,这样成本更低的成本显示更高的可能性,追踪分配一个跟踪检测。为了防止某些检测被分配给特定的追踪,使用正。
如果没有启用这个端口,过滤器的初始化过滤器的初始化函数计算成本矩阵使用距离的方法。
依赖关系
要启用这个端口,在端口设置选项卡上,选择使成本矩阵输入。
可检测TrackIDs- - - - - -可检测追踪id
实值米1矢量|实值米2矩阵
可检测追踪id,指定为一个实值米1的向量或米2矩阵。探测跟踪传感器会检测跟踪。矩阵的第一列包含一个追踪id列表,传感器可检测报告。可选的第二列允许您添加为每个跟踪探测概率。
不包括在铁轨的标识可检测TrackIDs被认为是无法觉察的。跟踪删除逻辑不计数的缺乏检测作为跟踪删除“错过了检测”的目的。
如果没有启用这个端口,追踪假定所有跟踪检测在每个块的调用。
依赖关系
要启用这个端口,在端口设置选项卡上,选择使检测跟踪输入id。
状态参数- - - - - -跟踪状态参数
金宝app包含MATLAB仿真软件总线结构
跟踪状态参数,指定为包含一个MATLAB仿真软件总线结构。金宝app结构形式:
| 场 | 描述 |
|---|---|
NumParameters |
数量的非默认状态参数,指定为一个非负整数 |
参数 |
状态参数的数组结构 |
块使用的价值参数场的StateParameters字段生成的跟踪。您可以使用这些参数来定义的坐标系跟踪报告或其他可取的属性生成的痕迹。
例如,您可以使用以下结构来定义一个直角坐标系的原点位置(10 10 0)米,其速度是起源(2 2 0)米每秒的场景。
| 字段名 | 价值 |
|---|---|
框架 |
“矩形” |
位置 |
(10 10 0) |
速度 |
(2 2 0) |
依赖关系
要启用这个端口,跟踪器配置选项卡中,选择随着时间的推移,更新跟踪状态参数参数。
输出
确认跟踪- - - - - -确认跟踪
金宝app包含MATLAB仿真软件总线结构
跟踪确认,返回包含MATLAB作为仿真软件总线结构。金宝app结构形式:
| 场 | 描述 |
|---|---|
NumTracks |
数量的跟踪 |
跟踪 |
轨道结构的阵列的长度设定的最大数量的跟踪参数。只有第一个NumTracks这些都是实际的跟踪。 |
轨道结构的字段所示<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">轨道结构。
根据跟踪确认跟踪逻辑,如果:
至少历史——跟踪接收
米检测在过去N更新。米和N中指定确认阈值为历史逻辑。集成的综合概率跟踪确认存在高于阈值中指定确认阈值为
集成逻辑。
试探性的跟踪- - - - - -试探性的跟踪
金宝app包含MATLAB仿真软件总线结构
试探性的痕迹,返回包含MATLAB作为仿真软件总线结构。金宝app初步证实了之前一个跟踪。
轨道结构的字段所示<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">轨道结构。
依赖关系
要启用这个端口,在端口设置选项卡上,选择使初步跟踪输出。
所有的歌曲- - - - - -确认和试探性的跟踪
金宝app包含MATLAB仿真软件总线结构
确认列表并初步跟踪相结合,作为一个包含MATLAB仿真软件总线结构返回。金宝app
轨道结构的字段所示<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">轨道结构。
依赖关系
要启用这个端口,在端口设置选项卡上,选择使所有跟踪输出。
信息- - - - - -附加信息分析跟踪更新
金宝app包含MATLAB仿真软件总线结构
附加信息分析跟踪更新,返回包含MATLAB作为仿真软件总线结构。金宝app
这个表显示的字段信息结构:
| 场 | 描述 |
OOSMDetectionIndices |
按顺序测量的指标跟踪器的当前步骤 |
TrackIDsAtStepBeginning |
当步骤开始追踪id。 |
CostMatrix |
运动的成本分配矩阵,(我,j)元素表示的成本分配我来检测j。 |
集群 |
集群单元阵列的报告。看到<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">可行联合事件为更多的细节。 |
InitiatedTrackIDs |
IDs的追踪期间启动步骤。 |
DeletedTrackIDs |
IDs的痕迹删除步骤。 |
TrackIDsAtStepEnd |
追踪id步骤结束时。 |
MaxNumDetectionsPerCluster |
检测的最大数量在所有集群生成步骤。结构只有当你设置这个字段使内存管理参数在。 |
MaxNumTracksPerCluster |
跟踪的最大数量在所有集群生成步骤。结构只有当你设置这个字段使内存管理参数在。 |
OOSMHandling |
分析信息按顺序测量处理,作为一个结构返回。只有这一领域的结构 |
的集群字段可以包括多个集群报告。每个集群的报告是一个结构,它包含:
| 场 | 描述 |
DetectionIndices |
集群检测的指标。 |
TrackIDs |
追踪id的集群。 |
ValidationMatrix |
验证集群的矩阵。看到<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">可行联合事件为更多的细节。 |
SensorIndex |
指数的原始集群检测的传感器。 |
时间戳 |
意思是时间戳的集群检测。 |
MarginalProbabilities |
矩阵的边际概率后联合协会。 |
的OOSMHandling结构包含这些字段:
| 场 | 描述 |
|---|---|
DiscardedDetections |
丢弃的乱序执行检测的指标。OOSM是丢弃如果不是由指定的历史保存的状态最大数量的OOSM步骤参数。 |
CostMatrix |
按顺序分配矩阵的检测成本。 |
集群 |
只有按顺序检测相关集群。 |
UnassignedDetections |
未赋值的指数按顺序检测。跟踪器创建新的追踪未赋值的乱序执行检测。 |
依赖关系
要启用这个端口,在端口设置选项卡上,选择使信息输出。
参数
跟踪标识符- - - - - -唯一的跟踪标识符
0(默认)|非负整数
指定唯一的跟踪标识符是一个非负整数。这个参数的传递SourceIndex在跟踪输出,区分来自不同的追踪器的跟踪multiple-tracker系统。您必须指定这个属性是一个正整数使用的跟踪输出作为输入<一个href="//www.tatmou.com/help/fusion/ref/tracktotrackfuser.html">进行航迹熔化炉块。
例子:1
过滤器的初始化函数- - - - - -过滤器的初始化函数
initcvekf(默认)|函数名
过滤器的初始化函数,指定为一个有效的过滤初始化函数的函数名。跟踪器使用过滤器的初始化函数在创建新的轨道。
传感器融合和跟踪工具箱™供应许多初始化函数:
| 初始化函数 | 函数定义 |
|---|---|
initcvkf |
初始化常速线性卡尔曼滤波器。 |
initcakf |
初始化加速度恒定线性卡尔曼滤波器。 |
initcvabf |
初始化常速α-β滤波器 |
initcaabf |
初始化恒定加速度α-β滤波器 |
initcvekf |
常速扩展卡尔曼滤波器进行初始化。 |
initcaekf |
初始化加速度恒定扩展卡尔曼滤波器。 |
initrpekf |
初始化常速range-parametrized扩展卡尔曼滤波器。 |
initapekf |
初始化常速angle-parametrized扩展卡尔曼滤波器。 |
initctekf |
初始化constant-turn-rate扩展卡尔曼滤波器。 |
initcackf |
初始化加速度恒定体积过滤器。 |
initctckf |
初始化constant-turn-rate求容积法过滤器。 |
initcvckf |
初始化常速求容积法过滤器。 |
initcvukf |
初始化常速无味卡尔曼滤波器。 |
initcaukf |
初始化加速度恒定无味卡尔曼滤波器。 |
initctukf |
初始化constant-turn-rate无味卡尔曼滤波器。 |
initcvmscekf |
初始化常速扩展卡尔曼滤波器在球坐标修改。 |
initekfimm |
初始化跟踪IMM滤波器。 |
您还可以使用该语法编写自己的初始化函数:
过滤器= filterInitializationFcn(检测)
objectDetection。这个函数的输出必须过滤对象:<一个href="//www.tatmou.com/help/fusion/ref/trackingkf.html">trackingKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.html">trackingEKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingukf.html">trackingUKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingckf.html">trackingCKF,<一个href="//www.tatmou.com/help/fusion/ref/trackinggsf.html">trackingGSF,<一个href="//www.tatmou.com/help/fusion/ref/trackingimm.html">trackingIMM,<一个href="//www.tatmou.com/help/fusion/ref/trackingmscekf.html">trackingMSCEKF,或<一个href="//www.tatmou.com/help/fusion/ref/trackingabf.html">trackingABF。
指导编写这个函数使用类型命令来检查内置的MATLAB函数的细节。例如:
类型initcvekf
请注意
块不接受所有过滤器在传感器融合和跟踪初始化函数工具箱。过滤器的初始化函数的完整列表可以在传感器融合和跟踪工具箱中给出初始化的部分<一个href="//www.tatmou.com/help/fusion/estimation-filters.html" class="a">估计过滤器。
的k值k-best JPDA- - - - - -的k值k-best JPDA
正(默认)|正整数
k-best JPDA的k值,指定为一个正整数。这个参数定义的最大数量可行联合事件跟踪和检测协会的每个集群。将这个属性设置为一个有限值使您能够运行一个k-best JPDA跟踪器,每个集群生成一个k的最大事件。
可行联合事件生成函数的名字- - - - - -可行联合事件生成函数的名字
jpdaEvents(默认)|函数名
可行联合事件生成函数名称,指定为一个可行联合事件生成函数的名称。一代函数生成可行联合事件矩阵关联矩阵跟踪和检测之间的可能性。有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda.jpdaevents.html">jpadEvents
编写自己的生成函数,您必须使用这个语法。
[FJE, FJEProbs] = myfunction (likelihoodMatrix k)
jpdaEvents。
您可以使用类型命令来检查的细节jpdaEvents。
类型jpdaEvents
例子:myfunction
最大数量的跟踪- - - - - -最大数量的跟踪
One hundred.(默认)|正整数
最大数量的块可以保持跟踪,指定为一个正整数。
最大数量的传感器- - - - - -最大数量的传感器
20.(默认)|正整数
最大数量的传感器,块过程中,可以指定为一个正整数。这个值应大于或等于最高SensorIndex输入的值检测输入端口。
检测的绝对时间戳之间的宽容- - - - - -检测的绝对时间戳之间的宽容
20.(默认)|正整数
绝对时间检测的传感器之间的宽容,指定为一个积极的标量。阻止预计检测传感器有相同的时间戳。然而,如果时间戳之间的差异检测传感器的在此参数所指定的保证金,这些检测将被用来更新跟踪估计基于这些检测的平均时间。
按顺序测量数据处理- - - - - -按顺序测量数据处理
终止(默认)|忽视|Retrodiction
按顺序处理,测量指定为终止,忽视,或Retrodiction。每个检测都有一个关联的时间戳,td跟踪器块都有它自己的时间戳,tt在每次调用更新。跟踪器块作为OOSM如果认为测量td<tt。
当你指定的参数为:
终止——块停止运行时遇到乱序执行测量。忽视——块忽略任何按顺序测量并继续运行。Retrodiction——块使用retrodiction算法更新追踪通过忽视OOSMs,更新现有的跟踪,或创建新的使用OOSMs跟踪。您必须指定一个过滤器的初始化函数,返回一个<一个href="//www.tatmou.com/help/fusion/ref/trackingkf.html">trackingKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.html">trackingEKF,或<一个href="//www.tatmou.com/help/fusion/ref/trackingimm.html">trackingIMM对象过滤器的初始化函数参数。
如果指定这个参数Retrodiction,跟踪处理OOSM遵循这些步骤:
如果OOSM时间戳超出最古老的校正时间戳(指定的最大数量的OOSM步骤参数)保持追踪,追踪OOSMs丢弃。
如果OOSM时间戳在最古老的校正时间戳的追踪,追踪第一retrodicts所有现有的跟踪OOSMs时。然后,追踪应用联合概率数据关联算法,试图把OOSMs retrodicted跟踪。
如果跟踪成功associates OOSM至少一个retrodicted轨道,然后使用OOSMs追踪更新retrodicted跟踪通过应用retro-correction算法获得当前,跟踪纠正。
如果追踪者不能副OOSM任何retrodicted跟踪,然后跟踪器创建一个新的跟踪基于OOSM和预测当前时间。
为更多的细节在JPDA-based retrodiction,明白了<一个href="//www.tatmou.com/help/fusion/ref/trackingkf.retrocorrectjpda.html" class="a">JPDA-Based Retrodiction和Retro-Correction驶,模拟按顺序检测使用<一个href="//www.tatmou.com/help/fusion/ref/objectdetectiondelay-system-object.html">objectDetectionDelay。
请注意
当您选择
Retrodiction,你不能使用<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">成本矩阵输入。使用retrodiction减少的好处随着目标的数量在近距离增加。
跟踪器需要共享相同的所有输入信号检测
SensorIndex有自己的时间差异有界的检测的绝对时间戳之间的宽容参数。因此,当你设置按顺序测量数据处理参数忽视,您必须确保按顺序检测时间戳严格小于前一个跟踪器运行时的时间戳。
最大数量的OOSM步骤- - - - - -最大数量的OOSM步骤
3(默认)|正整数
按顺序测量的最大数量(OOSMs)步骤,指定为一个正整数。
增加该参数的值需要更多的内存,但允许您调用跟踪和OOSMs块更大的延迟相对于当块上次更新的时间戳。同时,随着延迟的增加,OOSM的影响当前状态的跟踪了。该参数的推荐值3。
依赖关系
要启用该参数,设置按顺序测量数据处理参数Retrodiction。
跟踪状态参数- - - - - -参数跟踪状态的参考系
结构|结构数组
指定的参数跟踪状态参考系作为一个结构或一个结构数组。块传递这个参数的值StateParameters字段生成的跟踪。您可以使用这些参数来定义的坐标系跟踪报告或其他可取的属性生成的痕迹。
例如,您可以使用以下结构来定义一个直角坐标系的原点位置(10 10 0)米,其速度是起源(2 2 0)米每秒的场景。
| 字段名 | 价值 |
|---|---|
框架 |
“矩形” |
位置 |
(10 10 0) |
速度 |
(2 2 0) |
你可以通过更新轨道状态参数状态参数通过选择输入端口随着时间的推移,更新跟踪状态参数参数。
数据类型:结构体
随着时间的推移,更新跟踪状态参数- - - - - -随着时间的推移,更新跟踪状态参数
从(默认)|在
选择要启用该参数的输入端口通过跟踪状态参数状态参数输入端口。
使内存管理- - - - - -使内存管理
从(默认)|在
选择这个参数来启用跟踪内存管理。一旦选择,你可以使用这四个参数内存管理选项卡指定特定的大小可变的数组的边界跟踪以及确定如何追踪处理集群大小违规行为:
最大数量的检测传感器
检测/集群的最大数量
跟踪每个集群的最大数量
处理运行时违反了集群大小
指定范围的大小可变的数组允许您管理的内存占用跟踪器在生成的C / c++代码。
模拟使用- - - - - -类型的模拟运行
解释执行(默认)|代码生成
解释执行——使用MATLAB模拟模型解释器。这个选项可以缩短启动时间。在解释执行模式,你可以调试的源代码。代码生成使用生成的C代码,模拟模型。第一次运行仿真,仿真软件生成C代码块。金宝app后续模拟的C代码重用,只要不改变模型。这个选项需要额外的启动时间。
阈值分配检测跟踪- - - - - -阈值分配检测跟踪
30 *[1正]积极标量(默认)| | 1×2向量的积极的价值观
阈值检测分配给轨道(或控制阈值),指定为一个积极的标量或矢量1×2 (C1C2),C1≤C2。如果指定为一个标量,指定的值,瓦尔,是扩大到瓦尔,正]。
最初,跟踪执行规范化的粗估计所有的跟踪和检测之间的距离。跟踪器只计算准确的归一化距离粗归一化距离小于的组合C2。同时,追踪只能分配一个检测跟踪如果准确的归一化距离小于C1。看到<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.distance.html" class="a">算法一个解释的归一化距离。
增加的价值C2如果有跟踪和检测组合,但不应计算作业。降低这个值,如果成本计算需要太多时间。
增加的价值C1如果有检测,但不应该分配给足迹。降低这个值是否有检测分配给跟踪他们不应该分配给(太远)。
请注意
如果该值的C2是有限的,状态转换函数和测量功能,跟踪滤波器中指定用于追踪,必须能够拿一个吗米——- - - - - -N矩阵的状态作为输入和输出N预测状态和N分别测量。米是国家的大小。N的状态数,任意一个非负整数。
阈值来初始化一个跟踪- - - - - -阈值来初始化一个跟踪
0(默认)|标量在[0,1]
概率阈值来初始化一个新的轨道,指定为一个标量在[0,1]。如果关联的概率与任何现有的检测跟踪都小于InitializationThreshold检测是用来初始化一个新的轨道。这允许检测验证大门内的跟踪,但有一个协会概率低于初始化阈值产生一个新的轨道。
例子:0.1
检测概率- - - - - -检测概率
0.9(默认)|标量在[0,1]
检测概率,指定为一个标量在区间[0,1]。此属性用于边缘后验概率的计算协会和轨道的概率存在当初始化和更新一个跟踪。
杂乱的空间密度测量- - - - - -杂乱的空间密度测量
1 e-5(默认)|积极的标量
杂乱的空间密度测量,指定为一个积极的标量。杂波密度描述预期的假阳性检测单位体积的数量。它是用作杂乱泊松模型的参数。当类型的跟踪确认和删除逻辑被设置为“集成”,这个参数用于计算的初始概率跟踪存在。
类型的跟踪确认和删除逻辑- - - - - -确认和删除逻辑类型
历史(默认)|集成
确认和删除逻辑类型,选为:
历史——跟踪确认和删除是基于轨道的次数已经分配给一个检测的最新跟踪更新。集成-跟踪确认和删除是基于跟踪的可能性存在,这是集成在赋值函数。
确认阈值(mn)- - - - - -跟踪确认阈值对历史逻辑
(2、3)(默认)|实值向量的正整数1×2
历史逻辑,跟踪确认阈值指定为一个实值向量的正整数1×2(mn)。至少跟踪确认是否收到米检测在过去N更新。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“历史”。
删除阈值(P, Q)- - - - - -历史记录删除阈值逻辑
(5,5)(默认)|实值向量的正整数1×2
历史记录删除阈值逻辑,指定为一个实值向量1×2的正整数,[P Q]。如果在P最后的问跟踪更新,跟踪没有分配到任何检测确认的可能性大于阈值注册“打击”或“小姐”参数,那么跟踪被删除。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“历史”。
阈值注册“打击”或“小姐”- - - - - -阈值注册“打击”或“小姐”
0.2(默认)|标量在[0,1]
阈值注册一个“打”或“小姐”,指定为一个标量范围[0,1]。追踪历史逻辑寄存器“小姐”,跟踪将滑行如果分配的边际概率的总和是以下HitMissThreshold。否则,跟踪历史逻辑寄存器“打击”。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“历史”。
确认阈值(概率)- - - - - -跟踪确认阈值逻辑综合
0.95(默认)|积极的标量
集成逻辑,跟踪确认阈值指定为一个实正的标量。跟踪确认如果它存在的概率大于或等于确认阈值。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“集成”。
删除阈值(概率)- - - - - -跟踪集成逻辑删除阈值
0.1(默认)|积极的标量
跟踪集成逻辑删除阈值,指定为一个积极的标量。记录被删除,如果存在低于这个阈值的概率。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“集成”。
空间密度的新目标- - - - - -空间密度的新目标
1 e-5(默认)|积极的标量
空间密度的新目标,指定为一个积极的标量。新目标密度描述的预期数量,单位体积内的新线路测量空间。它是用于计算跟踪跟踪初始化期间存在的概率。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“集成”。
时间的真正目标死亡- - - - - -时间的真正目标死亡
0.01(默认)|标量在[0,1]
死亡时间的真正目标,指定为一个标量在[0,1]。这个参数描述真实目标消失的概率。它与轨道的概率存在的传播(PTE):
在哪里死亡率是真正的目标死亡的时间变化率,δt是上次更新的时间间隔时间吗t。
依赖关系
要启用该参数,设置类型的跟踪确认和删除逻辑来“集成”。
预测时间源- - - - - -源的预测时间
汽车(默认)|输入端口
源预测时间,指定为输入端口或汽车。选择输入端口通过输入一个更新时间预测的时间输入端口。否则,由仿真软件仿真时钟管理决定了更新的时间。金宝app
使成本矩阵输入- - - - - -允许输入端口成本矩阵
(默认)|
选中此复选框后,可以通过使用成本的输入矩阵成本矩阵输入端口。
使检测跟踪输入id- - - - - -使检测跟踪输入id
(默认)|
选中此复选框来启用的可检测追踪id输入端口。
使初步跟踪输出- - - - - -使初步跟踪输出端口
(默认)|
选中此复选框后,可以初步的输出跟踪通过试探性的跟踪输出端口。
使所有跟踪输出- - - - - -使所有跟踪输出端口
(默认)|
选中此复选框后,可以使所有的输出跟踪通过所有的歌曲输出端口。
使信息输出- - - - - -使输出端口进行分析信息
(默认)|
选中此复选框后,可以使信息通过输出端口进行分析信息输出端口。
输出总线名称的来源- - - - - -源的输出跟踪总线名称
汽车(默认)|财产
源的输出跟踪总线名称,指定为:
汽车——块自动创建一个输出跟踪总线名称。财产——指定输出跟踪总线名称使用指定一个输出总线名称参数。
输出信息总线名称的来源- - - - - -输出信息总线名称的来源
汽车(默认)|财产
源输出的信息总线名称指定为这些选项之一:
汽车——块自动创建一个输出信息总线名称。财产——指定输出信息总线名称使用指定一个输出总线名称参数。
最大数量的检测传感器- - - - - -最大数量的检测传感器
One hundred.(默认)|正整数
指定的最大数量每传感器检测一个正整数。这个参数决定了检测的最大数量,每个传感器可以通过追踪在跟踪的一个调用。
将这个参数设置为有限值,如果你想要跟踪建立高效的本地变量界限C / c++代码生成。将此属性设置为正如果你不想绑定每个传感器检测的最大数量。
依赖关系
要启用该参数,选择使内存管理在跟踪管理选项卡。
检测/集群的最大数量- - - - - -检测/集群的最大数量
5(默认)|正整数
指定的最大数量检测每个集群中运行时跟踪的一个正整数。
设置这个参数允许追踪一个有限值绑定集群大小和减少内存占用的跟踪器在生成的C / c++代码。将此属性设置为正如果你不想绑定检测每个集群的最大数量。
如果在运行时,检测在集群的数量超过这个参数,跟踪器的基础上作出反应处理运行时违反了集群大小参数。
依赖关系
要启用该参数,选择使内存管理在跟踪管理选项卡。
跟踪每个集群的最大数量- - - - - -跟踪每个集群的最大数量
5(默认)|正整数
指定的最大数量跟踪每个集群中运行时跟踪的一个正整数。
设置这个参数允许追踪一个有限值绑定集群大小和减少内存占用的跟踪器在生成的C / c++代码。将此属性设置为正如果你不想绑定检测每个集群的最大数量。
如果在运行时期间,跟踪的数量在一个集群中超过这个参数,跟踪反应的基础上处理运行时违反了集群大小参数。
依赖关系
要启用该参数,选择使内存管理在跟踪管理选项卡。
处理运行时违反了集群大小- - - - - -处理运行时违反了集群大小
汽车(默认)|财产
指定运行时的处理违反集群大小这些选项之一:
Teminate——跟踪报告错误如果集群中指定的界限检测/集群的最大数量和跟踪每个集群的最大数量参数在运行过程中违反了。分裂和警告——跟踪器将size-violating集群分为更小的集群通过使用一个次优的方法。跟踪器也报道警告指示违反。分裂——跟踪器将size-violating集群分为更小的集群通过使用一个次优的方法,不报告任何警告。
在次优方法,追踪分离检测或钉的可能性最小的协会和其他轨道或检测,直到满足集群范围。这些分离出来检测或跟踪可以形成一个或多个新的集群取决于彼此协会可能和阈值分配检测跟踪参数。
依赖关系
要启用该参数,选择使内存管理在跟踪管理选项卡。
算法
跟踪逻辑流程
当一个联合概率数据关联(JPDA)追踪过程检测、跟踪创建和管理遵循以下步骤:
跟踪器由原始传感器检测分为多个组。
为每个传感器:
跟踪器计算距离检测现有的跟踪和形式
costMatrix。跟踪创建一个验证矩阵根据赋值阈值(或门阈值)现有的痕迹。验证清单所有可能的矩阵是一个二进制矩阵detections-to-track关联。有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">可行联合事件。
跟踪和检测然后分为集群。集群可以包含一个或多个追踪追踪如果这些追踪共同检测在其验证盖茨。确认门是空间边界,预测检测的跟踪有很高的可能性下降。有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ref/jointprobabilisticdataassociationmultiobjecttracker.html" class="intrnllnk">可行联合事件。
更新所有集群后的顺序意味着检测集群中的时间戳。对于每个集群,追踪:
生成所有可行联合事件。有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ref/trackerjpda.jpdaevents.html">
jpdaEvents。可以包括类融合通过指定类的贝叶斯融合方法。计算各关节的后验概率事件。
计算每个个体的边际概率detection-track对集群中。
弱信号检测报告。弱信号检测的检测验证大门内的至少一个轨道,但概率协会所有追踪不到
IntitializationThreshold。更新跟踪集群中使用<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.correctjpda.html">
correctjpda。
未赋值的检测(检测没有任何集群)和弱探测生成新轨道。
跟踪检查所有跟踪来删除。删除跟踪基于扫描没有协会使用的数量
“历史”使用逻辑或基于存在概率“集成”跟踪逻辑。所有歌曲都将最新的时间价值(时间输入如果提供,或最新的意思是集群时间戳)。
可行联合事件
在典型的工作流跟踪系统,追踪需要确定检测可以与任何现有的痕迹。如果追踪者只维护一个跟踪,任务可以通过评估验证门在预测如果测量中测量和决定验证门。在测量空间,验证门是一个空间边界,如二维椭圆或三维椭球,集中在预测的测量。验证门使用概率定义的信息(例如,状态估计和协方差)现有的轨道,这样正确的或理想的检测有很高的可能性(例如,97%概率)在此验证门。
然而,如果一个跟踪维护多个追踪,数据关联过程变得更加复杂,因为一个检测可以属于多个轨道的验证盖茨。例如,在下图中,跟踪T1和T2积极维护跟踪,和他们每个人都有自己的验证。自检测D2盖茨的交叉验证的T1和T2,这两个轨道(T1和T2)相连,形成一个集群。集群是一组连接跟踪及其相关检测。
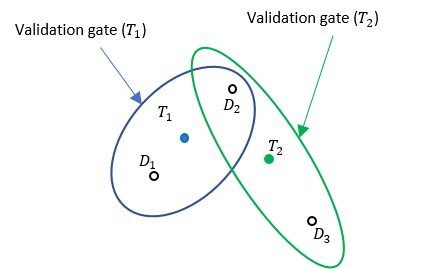
代表关联关系在一个集群中,验证矩阵是常用的。校验矩阵的每一行对应一个检测,而每一列对应一个跟踪。占每个检测的可能性被杂物,添加第一列,通常称为“跟踪0”或T0。如果检测D我在验证跟踪门Tj,(我,j+ 1)验证矩阵的条目是1。否则,它是零。集群所示图,验证矩阵Ω
注意所有Ω的第一列中的元素是1,因为任何检测可以混乱或假警报。逻辑中的一个重要步骤的联合概率数据关联(JPDA)是获取所有可行的独立联合事件在一个集群中。两个假设可行联合事件:
检测不能发出多个轨道。
轨道传感器无法检测到不止一次的在一个单一的扫描。
根据这两个假设,可以制定可行联合事件(fj)。每个FJE映射到一个FJE矩阵Ωp从最初的验证矩阵Ω。例如,验证矩阵Ω,八FJE矩阵可以得到:
作为一个直接后果的两个假设,Ωp矩阵每一行有一个“1”价值。此外,除了第一列映射到杂物,最多可以有每列的一个“1”。当连接跟踪数量的增长在一个集群中,FJE数量的增加迅速。的jpdaEvents函数使用一个有效的深度优先搜索算法来生成所有可行联合事件矩阵。
轨道结构
轨道结构的字段有:
| 场 | 定义 |
|---|---|
SourceIndex |
独特的资料索引用来区分多个追踪环境中追踪来源。 |
TrackID |
独特的跟踪标识用来区分多个轨道。 |
BranchID |
独特的标识符用来区分多个轨道分支跟踪分支。 |
UpdateTime |
时间的跟踪更新。单位是秒。 |
年龄 |
次数的活了下来。 |
状态 |
状态向量的值更新时间。 |
StateCovariance |
协方差矩阵不确定性。 |
TrackLogic |
确认和删除逻辑类型,返回“历史”或“集成”。 |
TrackLogicState |
的当前状态跟踪逻辑类型。基于类型的逻辑
|
IsConfirmed |
确认状态。这个字段是真正的如果轨道被证实是一个真正的目标。 |
IsCoasted |
滑行状态。这个字段是真正的如果没有新的更新跟踪检测。 |
IsSelfReported |
表明如果跟踪报告的追踪。这个字段用于跟踪融合环境。它返回 |
ObjectClassID |
整数值代表对象分类。的值0代表了一个未知的分类。非零分类仅适用于跟踪确认。 |
ObjectAttributes |
附加信息的跟踪。 |
扩展功能
C / c++代码生成
使用仿真软件生成C和c++代码®编码器™。金宝app
使用笔记和限制:
块支持金宝app严格的单精度与这些限制代码生成:
你必须指定的k值k-best JPDA参数作为一个有限的正整数。
您必须指定过滤器的初始化函数返回<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.html">
trackingEKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingukf.html">trackingUKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingckf.html">trackingCKF,或<一个href="//www.tatmou.com/help/fusion/ref/trackingimm.html">trackingIMM对象配置为单精度。
有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ug/generate-code-with-strict-single-precision-and-non-dynamic-memory-allocation-from-SFTT.html" class="a">生成代码与严格的单精度和非动态内存分配。
块支持金宝app非动态的内存分配与这些限制代码生成:
你必须指定的k值k-best JPDA参数作为一个有限的正整数。
您必须指定过滤器的初始化函数返回<一个href="//www.tatmou.com/help/fusion/ref/trackingekf.html">
trackingEKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingukf.html">trackingUKF,<一个href="//www.tatmou.com/help/fusion/ref/trackingckf.html">trackingCKF,或<一个href="//www.tatmou.com/help/fusion/ref/trackingimm.html">trackingIMM对象。
有关详细信息,请参见<一个href="//www.tatmou.com/help/fusion/ug/generate-code-with-strict-single-precision-and-non-dynamic-memory-allocation-from-SFTT.html" class="a">生成代码与严格的单精度和非动态内存分配。
使非动态内存分配的代码生成后,考虑使用这些参数设定界限的局部变量跟踪:
使内存管理
最大数量的检测传感器
检测/集群的最大数量
跟踪每个集群的最大数量
处理运行时违反了集群大小
在代码生成,如果检测中指定的输入
双精度,那么NumTracks字段返回跟踪输出的双变量。如果指定的检测输入单精度,那么NumTracks字段返回跟踪输出的uint32变量。
版本历史
介绍了R2019bR2023a:金宝app仿真软件总线中没有显示工作区
R2023a,创建的模型汽车这一块不金宝app再显示在MATLAB工作区。
MATLAB命令
你点击一个链接对应MATLAB命令:
运行该命令通过输入MATLAB命令窗口。Web浏览器不支持MATLAB命令。金宝app
你也可以从下面的列表中选择一个网站:
表现最好的网站怎么走吗
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。