进行航迹熔化炉
进行航迹融合
- 库:
传感器融合和跟踪工具箱/多目标跟踪算法
描述
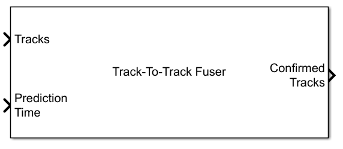
的进行航迹熔化炉金宝app®块是一个多源、多目标、轨迹级的融合器,它使用全局最近邻(GNN)关联来维持关于它融合的轨迹的单一假设。块的输入是来自已经跟踪多个对象的源的轨迹,比如多对象跟踪块或其他track-to-track fuser块。输入轨道被调用源或当地的跟踪,而在融合器中保持的轨迹称为中央跟踪.
港口
输入
跟踪-跟踪列表
金宝appSimulink总线包含MATLAB®结构
预测的时间-跟踪更新时间
真正的标量
跟踪更新时间,指定为以秒为单位的实标量。fuser更新所有的轨道到这个时候。更新时间必须随着块的每次调用而增加。更新时间必须至少与最大时间相同UpdateTime中指定的跟踪输入端口。
如果该端口未启用,则由Simulink管理的模拟时钟决定更新时间。金宝app
依赖关系
要启用该端口,请在端口设置选项卡,设置预测时间源来输入端口.
源配置—源配置列表
金宝appSimulink总线包含MATLAB结构
源配置列表,指定为包含MATLAB结构的Simulink总线。金宝app该结构有以下形式:
| 场 | 描述 |
|---|---|
NumConfigurations |
非缺省源配置个数。属性中指定的值必须小于源配置的最大数量参数。 |
配置 |
源配置结构的数组。 |
源配置结构的字段包括:
| 字段名 | 描述 |
|---|---|
SourceIndex |
源系统的唯一索引,指定为正整数。 |
IsInternalSource |
指示源是否在fuser内部,指定为真正的或假.内部源是熔断器直接熔断轨迹的源,即使轨迹不是自己报告的。例如,如果熔断器位于车辆水平,则将安装在相关车辆上的跟踪雷达视为内部雷达,而另一辆报告熔断轨迹的车辆则视为外部雷达。 |
IsInitializingCentralTracks |
指示源是否可以在fuser(指定为)中初始化中心轨道真正的或假.中心轨道是在熔合器中保持的轨道。 |
LocalToCentralTransformFcn |
函数将轨道从局部状态空间转换为中心状态空间,并指定为包含转换函数名称的字符串或字符向量。 |
CentralToLocalTransformFcn |
函数将轨道从中心状态空间转换为局部状态空间,并指定为包含转换函数名称的字符串或字符向量。 |
依赖关系
要启用该端口,请在熔化炉管理选项卡中,选择随时间更新源配置参数。
状态参数-轨迹状态参数
金宝appSimulink总线包含MATLAB结构
轨迹状态参数,指定为Simulink总线包含MATLAB结构。金宝app该结构有以下形式:
| 场 | 描述 |
|---|---|
NumParameters |
非默认状态参数的数量,指定为非负整数 |
参数 |
状态参数结构数组 |
的值参数场的StateParameters生成轨迹的场。您可以使用这些参数来定义报告轨道的参考框架或生成的轨道的其他理想属性。
例如,您可以使用以下结构来定义原点位置为的矩形参考系(10 10 0)米,原点速度是(2 2 0)m / s相对于情景框架。
| 字段名 | 价值 |
|---|---|
框架 |
“矩形” |
位置 |
(10 10 0) |
速度 |
(2 2 0) |
依赖关系
要启用此端口,请在跟踪器配置选项卡中,选择随时间更新轨道状态参数参数。
输出
确认跟踪——确认跟踪
金宝appSimulink总线包含MATLAB结构
确认轨道,返回为包含MATLAB结构的Simulink总线。金宝app该结构有以下形式:
| 场 | 描述 |
|---|---|
NumTracks |
数量的跟踪。 |
跟踪 |
所设置的长度的轨道结构阵列中央道的最大数目参数。只有第一个NumTracks这些都是真实的轨迹。 |
轨道结构的场显示在轨道结构.
方法中指定的阈值,则确认跟踪确认阈值的参数跟踪选项卡。
试探性的跟踪-初步跟踪
金宝appSimulink总线包含MATLAB结构
试探性轨道,返回为包含MATLAB结构的Simulink总线。金宝app一条跑道在确定之前是试探性的。
该结构有以下形式:
| 场 | 描述 |
|---|---|
NumTracks |
数量的跟踪。 |
跟踪 |
所设置的长度的轨道结构阵列中央道的最大数目参数。只有第一个NumTracks这些都是真实的轨迹。 |
轨道结构的场显示在轨道结构.
依赖关系
要启用该端口,请在端口设置选项卡上,选择启用试运行轨道输出.
所有的歌曲-确认的暂定轨道
金宝appSimulink总线包含MATLAB结构
确定和试探性轨道的组合列表,返回为包含MATLAB结构的Simulink总线。金宝app
该结构有以下形式:
| 场 | 描述 |
|---|---|
NumTracks |
数量的跟踪。 |
跟踪 |
所设置的长度的轨道结构阵列中央道的最大数目参数。只有第一个NumTracks这些都是真实的轨迹。 |
轨道结构的场显示在轨道结构.
依赖关系
要启用该端口,请在端口设置选项卡上,选择启用所有轨道输出.
信息-分析轨道更新的附加信息
金宝appSimulink总线包含MATLAB结构
用于分析轨道更新的附加信息,作为包含MATLAB结构的Simulink总线返回。金宝app
该表显示了信息结构的字段:
| 场 | 描述 |
BranchIDsAtStepBeginning |
更新开始时的分支id。 |
CostMatrix |
赋值矩阵的代价。 |
作业 |
返回的赋值 |
UnassignedTracks |
从跟踪器返回的未分配分支的id。 |
UnassignedDetections |
从跟踪器返回的未分配检测的id。 |
InitialBranchHistory |
分枝后和修剪前的分枝历史。 |
InitialBranchScores |
枝条在修剪前留下伤痕。 |
KeptBranchHistory |
初始修剪后的分枝历史。 |
KeptBranchScores |
初始修剪后的枝条评分。 |
集群 |
逻辑阵列映射分支到集群。如果分支在其历史中共享检测,或者直接或通过其他分支属于同一轨道,则它们属于同一集群。 |
TrackIncompatibility |
分支不相容矩阵。的 |
GlobalHypotheses |
逻辑矩阵映射分支到全局假设。相容的分支可以属于相同的假设。 |
GlobalHypScores |
全球假设的总得分。 |
PrunedBranches |
分支的逻辑数组 |
GlobalBranchProbabilities |
全局假设中各分支存在的全局概率。 |
BranchesDeletedByPruning |
被跟踪器删除的分支。 |
BranchIDsAtStepEnd |
更新结束时的分支id。 |
依赖关系
要启用该端口,请在端口设置选项卡上,选择使信息输出.
参数
熔化炉指数- track fuser的唯一索引
1(默认)|正整数
fuser的唯一索引,指定为正整数。使用此属性可在多保险丝环境中区分不同的保险丝。
例子:2
分配算法的名字——分配算法
MatchPairs(默认)|Munkres|Jonker-Volgenant|拍卖|自定义
赋值算法,指定为MatchPairs,Munkres,Jonker-Volgenant,拍卖,或自定义.Munkres是唯一能保证最优解决方案的分配算法,但它也是最慢的,特别是在大量检测和轨迹时。其他算法不能保证一个最优的解决方案,但可以更快的问题与20或更多的轨道和检测。使用自定义定义自己的赋值函数并在“自定义”赋值函数的名称参数。
数据类型:字符
“自定义”赋值函数的名称-自定义赋值函数的名称
函数名
“自定义”赋值函数的名称,作为函数名指定。赋值函数必须具有以下语法:
(作业、unassignedCentral unassignedLocal] = myfun(成本、costNonAssignment)
assignmunkres.
例子:myfun
依赖关系
要启用此属性,请设置分配算法的名字参数自定义.
将源分配到中心轨道的阈值-阈值分配源到中央轨道
(1正)* 30.0(默认)|正标量| 1 × 2正向量
将源分配到中心轨道的阈值,指定为正标量或1 × 2形式的向量[C1C2),C1≤C2.如果指定为标量,则指定值,瓦尔,扩展为[瓦尔正].
首先,fuser对所有源和中心轨迹之间的归一化距离进行粗略估计。fuser只计算粗归一化距离小于的源和中心组合的精确归一化距离C2.此外,如果局部轨道的精确归一化距离小于,则fuser只能将其分配到中心轨道C1.看到距离与跟踪滤波器一起使用的函数,用于解释距离计算。
提示
增加价值C2如果有源轨道和中心轨道的组合,应计算分配,但没有。如果计算时间太长,就减少它。
增加价值C1如果有源轨道,应该分配到中心轨道,但没有。如果有局部轨道被分配到不应该被分配到的中央轨道(太远),则减少它。
中央道的最大数目-中央轨道的最大数量
One hundred.(默认)|正整数
跟踪器可维护的最大中心轨迹数,指定为正整数。
源配置的最大数量—最大源配置个数
20.(默认)|正整数
fuser可以维护的最大源配置数,指定为正整数。
源配置—配置源系统
结构(SourceIndex, 1)(默认)|源配置结构数组
源系统的配置,指定为源配置结构的数组。源配置结构的字段包括:
| 字段名 | 描述 |
|---|---|
SourceIndex |
源系统的唯一索引,指定为正整数。 |
IsInternalSource |
指示源是否在fuser内部,指定为真正的或假.内部源是熔断器直接熔断轨迹的源,即使轨迹不是自己报告的。例如,如果熔断器位于车辆水平,则将安装在相关车辆上的跟踪雷达视为内部雷达,而另一辆报告熔断轨迹的车辆则视为外部雷达。 |
IsInitializingCentralTracks |
指示源是否可以在fuser(指定为)中初始化中心轨道真正的或假.中心轨道是在熔合器中保持的轨道。 |
LocalToCentralTransformFcn |
函数将轨道从局部状态空间转换为中心状态空间,并指定为包含转换函数名称的字符串或字符向量。 |
CentralToLocalTransformFcn |
函数将轨道从中心状态空间转换为局部状态空间,并指定为包含转换函数名称的字符串或字符向量。 |
随时间更新源配置—随时间更新源配置
从(默认)|在
选中该参数,表示通过源配置输入端口。
跟踪状态参数-轨道状态参考帧的参数
结构|结构数组
将轨道状态参考帧的参数指定为结构或结构数组。块将此参数的值传递给StateParameters生成轨迹的场。您可以使用这些参数来定义报告轨道的参考框架或生成的轨道的其他理想属性。
例如,您可以使用以下结构来定义原点位置为的矩形参考系(10 10 0)米,原点速度是(2 2 0)m / s相对于情景框架。
| 字段名 | 价值 |
|---|---|
框架 |
“矩形” |
位置 |
(10 10 0) |
速度 |
(2 2 0) |
属性可以更新轨道状态参数状态参数输入端口通过选择随时间更新轨道状态参数参数。
数据类型:结构体
随时间更新轨道状态参数-随时间更新轨道状态参数
从(默认)|在
选择此参数以启用通过状态参数输入端口。
模拟使用-模拟运行的类型
解释执行(默认)|代码生成
从以下选项中选择模拟类型:
解释执行-使用MATLAB解释器模拟模型。这个选项缩短了启动时间。在解释执行模式下,可以调试块的源代码。代码生成-使用生成的C代码模拟模型。第一次运行模拟时,Simulink会为代码块生成C代码。金宝app只要模型不改变,C代码就会在后续模拟中重用。这个选项需要额外的启动时间。
确认阈值[M N]-中心轨道确认阈值
3 [2](默认)|正整数|实值1 × 2正整数向量
中央轨道确认阈值,指定为正整数,米,或正整数的实值1 × 2向量,[米N].如果一个中心轨道至少被分配到本地轨道,那么它将被确认米最后的时间N更新。如果指定为正整数,米,确认阈值扩展为[米米].
删除阈值[P Q]-删除中心轨道的阈值
5 [5](默认)|正整数|实值1 × 2正整数向量
中央轨道删除阈值,指定为正整数,P,或1乘2的正整数向量[P问)与P≤问.如果一个中心轨道至少没有分配给本地轨道,则该中心轨道将被删除P最后的时间问更新。若指定正整数P,确认阈值扩展为[PP].
中心轨道状态大小-中央轨道状态大小
6(默认)|正整数
中央轨道状态大小,指定为正整数。
中心轨道对象属性-中心轨道对象属性
结构体(默认)|结构
中心跟踪对象属性,指定为结构。跟踪器将此参数的值传递给ObjectAttributes轨道输出的场。
状态转移函数-状态转移函数
constvel(默认)|函数名
状态转移函数,作为函数名指定。这个函数计算时间步长的状态k基于时间步长的状态k1。
如果启用附加过程噪声的参数跟踪选项卡被启用时,该函数必须使用以下语法:
地点:x (k) = f (x (k - 1), dt)
x (k)—在时间点估计的状态k,指定为向量或矩阵。如果指定为一个矩阵,则矩阵的每一列表示一个状态向量。dt—用于预测的时间步长。
如果启用附加过程噪声的参数跟踪选项卡未启用,该函数必须使用以下语法:
地点:x (k) = f (x (k - 1), w (k - 1), dt)
x (k)—在时间点估计的状态k,指定为向量或矩阵。如果指定为一个矩阵,则矩阵的每一列表示一个状态向量。w (k)-进程噪声时间k.dt—用于预测的时间步长。
例子:@constacc
状态转移雅可比函数-状态转移雅可比函数
函数名
状态转移函数的雅可比矩阵,作为函数名指定。如果没有指定,雅可比矩阵将进行数值计算,这可能会增加处理时间和数值误差。如果指定了,该函数必须支持以下两种语法之一:金宝app
如果启用附加过程噪声的参数跟踪选项卡被启用时,该函数必须使用如下语法:
地点:Jx (k) = statejacobianfcn (x (k), dt)
x (k)—在时间点估计的状态k,指定为米实值的-乘1向量。dt—用于预测的时间步长。Jx (k)状态转移函数关于状态的雅可比矩阵,df / dx,评估x (k).雅可比矩阵返回为米——- - - - - -米矩阵。
如果启用附加过程噪声的参数跟踪没有启用TAB,该函数必须使用以下语法:
地点:(Jx (k) (Jw (k)] = statejacobianfcn (x (k), w (k), dt)
x (k)-(估计的)时间状态k,指定为米实值的-乘1向量。w (k)-进程噪声时间k,指定为W实值的-乘1向量。dt—用于预测的时间步长。Jx (k)状态转移函数关于状态的雅可比矩阵,df / dx,评估x (k).雅可比矩阵返回为米——- - - - - -米矩阵。Jw (k)-状态转移函数对过程噪声的雅可比矩阵,df / dw,评估x (k)和w (k).雅可比矩阵返回为米——- - - - - -W矩阵。
例子:@constaccjac
过程噪声矩阵-处理噪声矩阵
(3)(默认)|正实标量|正定矩阵
处理噪声协方差矩阵,指定为正实标量或正定矩阵。
当启用附加过程噪声的参数跟踪选项卡启用时,指定流程噪声协方差为正实标量或正定米——- - - - - -米矩阵。米是状态向量的维数。当指定为标量时,矩阵为米——- - - - - -米每个对角元素等于标量的对角矩阵。
当启用附加过程噪声的参数跟踪选项卡未启用时,指定流程噪声协方差为aW——- - - - - -W矩阵。W为过程噪声向量的维数。
例子:[1.0 - 0.05;0.05 - 2]
启用附加过程噪声-启用添加过程噪声
从(默认)|在
启用附加过程噪声,指定为在或从.当它在时,将过程噪声添加到状态向量中。否则,状态转移函数中就会包含噪声。
状态融合函数-状态融合函数
交叉(默认)|十字路口|自定义
状态融合函数,指定为其中一个选项:
交叉—采用交叉协方差融合算法十字路口—使用协方差交集融合算法自定义—指定自定义融合功能“自定义”融合功能的名称参数
使用状态融合参数源参数指定状态融合算法使用的附加参数。
“自定义”融合功能的名称-自定义赋值函数的名称
函数名
自定义赋值函数的名称,以字符串或函数名指定。
状态融合函数必须支持以下语法之一:金宝app
[fusedState,fusedCov] = f(trackState,trackCov) [fusedState,fusedCov] = f(trackState,trackCov,fuseParams)
trackState指定为N——- - - - - -米矩阵。N轨道状态的维度是和吗米为轨道数。trackCov指定为N——- - - - - -N——- - - - - -米矩阵。N轨道状态的维度是和吗米为轨道数。fuseParams可选参数是否定义在状态融合参数源参数。fusedState作为N1的向量。fusedCov作为N——- - - - - -N矩阵。
依赖关系
要启用此属性,请设置状态融合函数参数自定义.
状态融合参数源-状态融合参数源
汽车(默认)|财产
状态融合参数源,指定为以下选项之一:
汽车—各状态融合算法的融合参数均采用默认值。看到交叉协方差因素,优化协方差基于,状态融合自定义算法参数为更多的细节。财产—使用,设置状态融合参数交叉协方差因素参数的时候状态融合函数是选为
交叉.优化协方差基于参数的时候状态融合函数是选为
十字路口.状态融合自定义算法参数参数的时候状态融合函数是选为
自定义.
交叉协方差因素-交叉协方差因子
0.4(默认)|标量范围(0,1)
交叉协方差因子,指定为范围(0,1)中的标量。看到fusexcov为更多的细节。
优化协方差基于-交集算法准则
依据(默认)|跟踪
交集算法标准,指定为依据或跟踪.看到fusecovint为更多的细节。
状态融合自定义算法参数-状态融合自定义算法参数
MATLAB变量
状态融合自定义算法参数,在任意变量类型中指定,只要设置匹配即可选fuseParams输入自定义状态融合函数,在“自定义”赋值函数的名称参数。
保险丝只确认源轨迹-保险丝只确认源轨迹
在(默认)|从
保险丝只确认源轨道,指定为在或从.将该参数设置为从如果你想融合所有的源轨道,而不管它们的确认状态。
保险丝滑行源轨迹-保险丝只确认源轨迹
从(默认)|在
保险丝沿海岸的源轨迹,指定为从或在.将该参数设置为在如果你想融合沿海的源轨迹。将其设置为从如果你想只融合源轨道,没有海岸。
预测时间源-预测时间的来源
汽车(默认)|输入端口
预测时间来源,指定为输入端口或汽车.选择输入端口方法输入更新时间预测的时间输入端口。否则,由Simulink管理的仿真时钟决定更新时间。金宝app
启用试运行轨道输出-启用试运行轨道的输出端口
从(默认)|在
选择此参数以启用通过试探性的跟踪输出端口。
启用所有轨道输出—开启所有轨道的输出端口
从(默认)|在
选择此参数以启用通过所有的歌曲输出端口。
使信息输出—开启分析信息的输出端口
从(默认)|在
选中该参数,表示启用通过信息输出端口。
输出总线名称的来源-输出轨道总线名称的来源
汽车(默认)|财产
输出轨道总线名称的来源,指定为:
汽车—块自动创建一个输出轨道总线名称。财产—使用命令指定输出轨道总线名称指定输出总线名称参数。
输出信息总线名称的来源-输出信息总线名称的来源
汽车(默认)|财产
输出信息总线名的来源,指定为以下选项之一:
汽车—块自动创建一个输出信息总线名。财产—使用命令指定输出信息总线名称Fuser信息总线名称参数。
算法
轨道结构
轨道结构的领域有:
| 场 | 定义 |
|---|---|
SourceIndex |
唯一源索引用于在多个跟踪器环境中区分跟踪源。 |
TrackID |
用于区分多个轨道的唯一轨道标识符。 |
BranchID |
用于区分多个轨道分支的唯一轨道分支标识符。 |
UpdateTime |
轨道更新的时间。单位是秒。 |
年龄 |
轨道存活的次数。 |
状态 |
状态向量在更新时的值。 |
StateCovariance |
协方差矩阵不确定性。 |
TrackLogic |
确认和删除逻辑类型,返回为“历史”或“分数”. |
TrackLogicState |
轨道逻辑类型的当前状态。根据逻辑类型
|
IsConfirmed |
确认状态。这个字段是真正的如果该轨迹被确认为真实目标。 |
IsCoasted |
滑行状态。这个字段是真正的如果轨道被更新而没有新的检测。 |
IsSelfReported |
指示跟踪器是否报告该轨迹。该领域用于轨道融合环境。它被返回为 |
ObjectClassID |
表示对象分类的整数值。的值0表示未知的分类。非零分类仅适用于已确认的轨道。 |
ObjectAttributes |
轨道的附加信息。 |
扩展功能
C / c++代码生成
使用Simulink®Coder™生成C和c++代码。金宝app
另请参阅
trackFuser|Track-Oriented Multi-Hypothesis追踪|全局最近邻多目标跟踪器|联合概率数据关联多目标跟踪器|跟踪连接
主题
- 创建Nonvirtual公交车(金宝app模型)
MATLAB命令
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
你也可以从以下列表中选择一个网站:
如何获得最佳的网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。