Track-Oriented Multi-Hypothesis追踪
Track-Oriented Multi-Hypothesis追踪
- 库:
传感器融合和跟踪工具箱/多目标跟踪算法
描述
的Track-Oriented Multi-Hypothesis追踪块处理来自多个传感器的多目标的检测。确认,追踪块初始化预测,纠正和删除的痕迹。跟踪器的输入块生成的检测报告objectDetection,fusionRadarSensor,irSensor,或sonarSensor对象。跟踪器块估计状态向量和状态向量的协方差矩阵为每一个轨道。跟踪器分配检测基于track-oriented, multi-hypothesis方法。
任何新的追踪从一开始试探性的状态。如果足够的检测是分配给一个试探性的轨道,它的状态改变确认。如果发现已经有一个已知的分类(ObjectClassID现场返回的跟踪是零),立即跟踪确认。当跟踪确认,多目标跟踪器认为代表一个物理对象的跟踪。如果检测不分配给跟踪在一个指定的数量的更新,删除。如何追踪功能的概述,请参阅算法。
港口
输入
输出
参数
模型的例子
算法
作业Multi-Hypothesis跟踪器的阈值
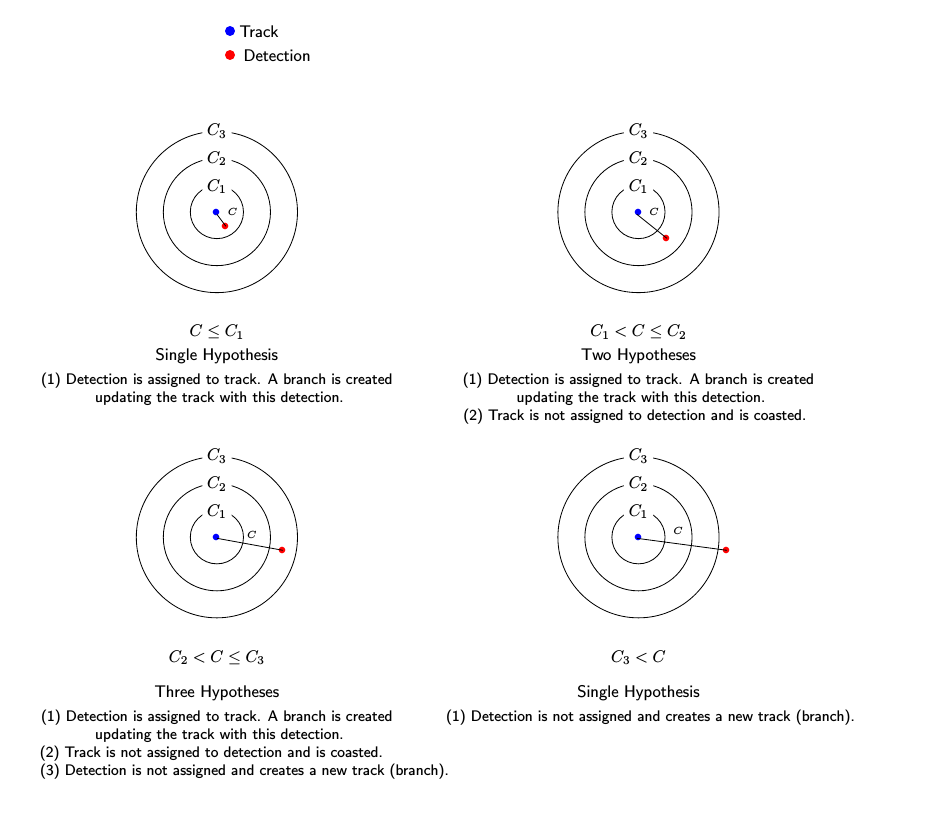
三个赋值阈值,C1,C2,C3、控制(1)赋值的检测跟踪,(2)创建一个新的分支从检测,和(3)创建一个新的分支未赋值的跟踪。阈值必须满足:C1< =C2< =C3。
如果作业的成本C = costmatrix (i, j),创建了基于以下假设比较成本分配的值阈值。下面每一比较,列出可能的假设。
小贴士:
增加的价值C3如果有检测,但不应该分配给足迹。减少价值是否有检测分配给跟踪他们不应该分配给(太远)。
增加的值C1和C2有助于控制跟踪创建分支的数量。然而,这样做减少了数量的分支(假设)每个记录都有。
允许每个跟踪未赋值的集合C1= 0。
允许每个检测未赋值的集合C2= 0。
引用
[1]Werthmann, j . R。“一步一步地描述计算有效版本的多假设跟踪。”In国际社会对光学和光子学卷,1698年,第301 - 228页,1992年。
[2]Blackman, S。,r . Popoli。现代跟踪系统的设计与分析。Artech房子雷达图书馆,波士顿,1999年。
扩展功能
另请参阅
功能
对象
objectDetection|trackingKF|trackingEKF|trackingUKF|trackingCKF|trackingPF|trackingMSCEKF|trackingGSF|trackingIMM|trackingABF|objectTrack|fusionRadarSensor|sonarSensor|irSensor|trackerGNN
块
主题
- 介绍多目标跟踪
- 介绍任务跟踪系统中的方法
- 创建Nonvirtual公交车(金宝app模型)