灰
线性灰度盒模型估计
语法
sys =老龄化最严重的(数据、init_sys)
sys = greyest(数据,init_sys,opt)
[sys,x0] = greyest(___)
描述
SYS.=感动(数据,init_sys.)SYS.,使用时间或频域数据,数据.输入和输出的尺寸数据和init_sys.,一个idgrey.模型,必须匹配。SYS.是一个确定的idgrey.具有相同结构的模型init_sys..
输入参数
|
估计数据。 输入和输出的尺寸 对于时域估计, 对于频域估计, |
|
识别的线性灰度框模型,用于配置初始参数化
|
|
估算选项。
|
输出参数
|
估计灰度盒模型,作为一个返回 有关使用的估计结果和选项的信息存储在
有关使用的更多信息 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
在估计期间计算的初始状态,作为包含与每个实验相对应的列向量的矩阵。 该数组也存储在 |
例子
估计灰色矩形模型
使用线性灰盒框架估算DC电机的参数。
加载测量数据。
加载(全氟(MatlaBroot,'工具箱',“识别”,“iddemos”,'数据','dcmotordata'));数据= IDDATA(Y,U,0.1,“名字”,直流电机的);数据。InputName ='电压';data.inputunit =.“V”;data.outputname = {'角度位置','角速度'};data.outputunit = {rad的,'rad / s'};data.tstart = 0;data.timeUnit =.“年代”;
数据是一个iddata.包含输出的测量数据的对象,角度位置,角速度。它还包含输入,驱动电压。
创建表示系统动态的灰盒模型。
对于直流电机,选择角位置(rad)和角速度(rad/s)作为输出,驱动电压(V)作为输入。建立如下形式的线性状态空间结构:
电机的时间常数是秒,和 是RAD /(V * S)中的输入到角速度的静态增益。
g = 0.25;tau = 1;init_sys = idgrey(“motorDynamics”τ,'光盘',g,0);
状态空间形式的控制方程在Matlab®文件中表示motordynamics.m.要查看此文件的内容,请输入编辑motordynamics.m.在MATLAB命令提示符处。
是提供给的已知数量motordynamics.m作为可选参数。
是一个免费的估计参数。
init_sys.是一个idgrey.模型与摩托车.
估计 .
sys = greyest(数据,init_sys);
SYS.是一个idgrey.模型中包含的估计值
.
的参数值估计SYS., 用getpvec(系统).
分析结果。
选择= compareOptions ('初始条件','零');比较(数据,SYS,INF,OPT)
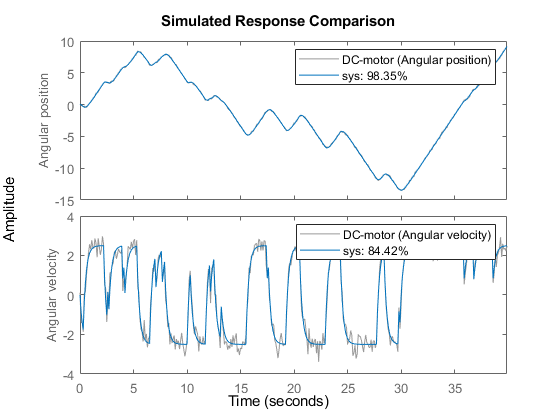
SYS.提供98.35%适合角位置,84.42%适合角速度。
用正则化方法估计灰盒模型
在使用正则化常数时,利用参数的先验信息估计直流电机的参数。
该模型通过静态增益参数化G和时间常数
.根据先前的知识,我们知道G大约是4
约为1.此外,您对价值有更多的信心
比G并希望指导估计保持接近最初的猜测。
负荷估算数据。
负载regularizationExampleData.matmotordata.
数据包含电动机的角度位置和给定输入电压的速度测量。
创建一个idgrey.直流电机动力学模型。使用功能DCMotorode.表示灰度盒模型的结构。
mi = idgrey(@dcmotorode,{'G',4;“τ”,1},'光盘',{},0);mi = setpar(mi,'标签','默认');
如果你想查看DCMotorode.函数,类型:
类型DCMotorode.m.
功能[a,b,c,d] = dcmotorode(g,tau,ts)%dcmotorode ode文件,表示DC电动机的动态通过增益g和时间常数tau。%% [a,b,c,d,k,x0] = dcmotorode(g,tau,ts)用时间常数tau和静态增益G返回DC电动机的状态空间矩阵%。样品%的时间是TS。如果输入参数TS%为零,%%此文件返回连续时间表示。如果TS> 0,则返回离散时间表示。%%另见Idgrey,Greyest。%版权所有2013 MathWorks,Inc.A = [0 1; 0 -1 / Tau];b = [0;G / TAU];c =眼睛(2); D = [0;0]; if Ts>0 % Sample the model with sample time Ts s = expm([[A B]*Ts; zeros(1,3)]); A = s(1:2,1:2); B = s(1:2,3); end
指定正则化选项Lambda。
选择= greyestOptions;opt.Regularization.Lambda = 100;
指定正则化选项R。
opt.Regularization.R = [1,1000];
您可以在第二个参数上指定更多加权,因为您对价值有更多的信心
比G.
指定参数的初始值作为常规化选项 *.
Opt.Regularization.Nominal ='模型';
估计正则化灰箱模型。
SYS = Greyest(Motordata,MI,OPT);
扩展能力
你也可以从以下列表中选择一个网站: