速度控制算法设计
使用以下步骤设计速度控制算法:
创建一个速度控制器子系统。目前您在前面创建的控制器子系统使用
Iq_ref当前速度控制器子系统的输出作为输入。创建一个速度控制器子系统,打开模型金宝app®库浏览器和选择离散PI控制器anti-windup &重置块的
电机控制Blockset /控制/控制器图书馆。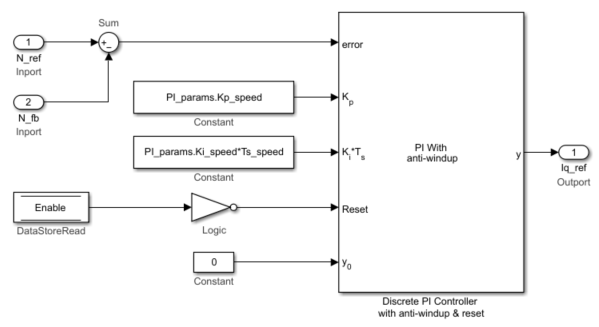
MATLAB®函数
mcb_SetControllerParameters(模型中初始化脚本)计算π控制收益d设在和问设在电流控制器和速度控制器。控制器的计算收益的详细信息,请参阅估计控制收益和使用效用函数。例如,看到模型初始化脚本文件mcb_pmsm_foc_qep_f28379d_data.m(在这个例子中使用磁场定向控制的永磁同步电动机使用正交编码器),使用一个采样时间(Ts_speed)500年μs。可选地,您可以使用启用数据存储内存块复位控制器。创建一个速度控制器,并添加子系统率转换块(从
金宝app模型/信号属性库)的子系统的输入样本的时间Ts_speed(执行时间的速度控制回路)。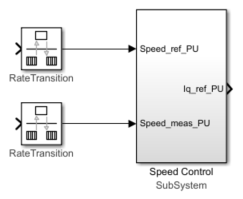
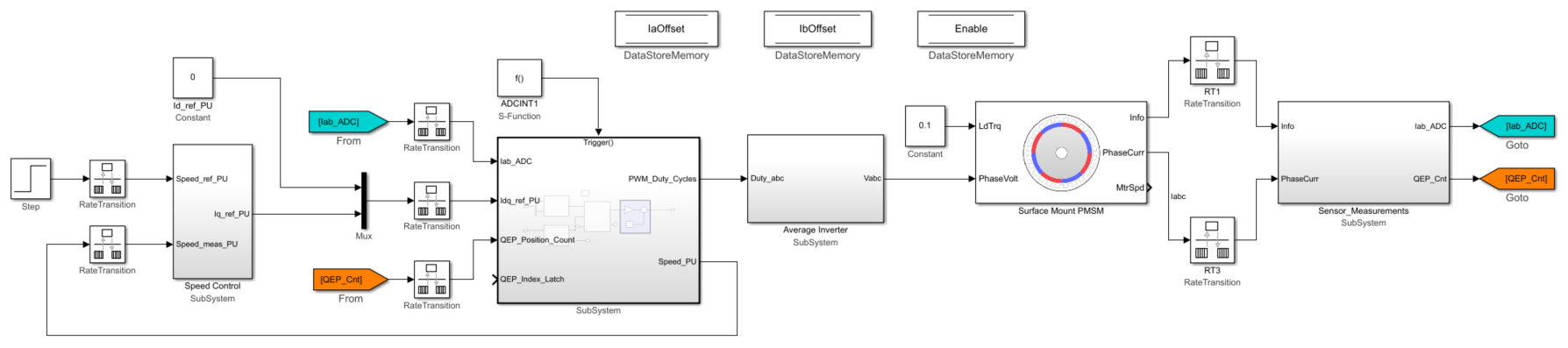
整合速度控制器子系统(您在步骤2中创建)集成电流控制器和植物模型子系统。连接Iq_ref_PU速度控制器子系统的输出端口的输入端通过电流控制器子系统率转换块。的率转换块是必要的,因为两个端口执行在不同的采样率。这个图显示了一个示例的参数设置率转换块连接到速度控制器和电流控制器子系统。
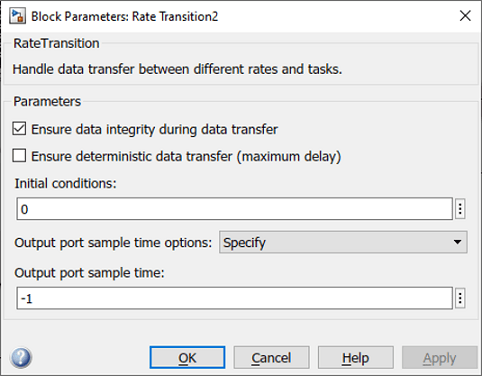
这图显示了综合速度控制器,电流控制器和植物模型子系统。