ahrs10filter
高度和方向由玛格和高度计读数
描述
的ahrs10filterobject融合了MARG和高度计传感器数据来估计设备的高度和方向。MARG(磁性,角速度,重力)数据通常来自磁力仪,陀螺仪和加速度传感器。该滤波器使用18个元素的状态向量来跟踪方向四元数、垂直速度、垂直位置、MARG传感器偏差和地磁向量。的ahrs10filter对象使用扩展卡尔曼滤波器来估计这些量。
创建
描述
保险丝= ahrs10filter保险丝用于MARG和高度计读数的传感器融合,以估计设备高度和方向。
保险丝= ahrs10filter (“ReferenceFrame”,射频)射频。射频指定为'NED'(北 - 东 - 下)或'ENU'(East-North-Up)。默认值为'NED'。
保险丝= ahrs10filter (___,名称,值)的名字到指定的值。未指定的属性具有默认值。
属性
对象的功能
预测 |
使用加速度计和陀螺仪的数据更新状态 |
fusemag |
使用磁强计数据修正状态 |
fusealtimeter |
使用高度计数据正确的状态 |
正确的 |
使用直接的状态测量纠正状态 |
剩余 |
从国家直接测量的残余物和剩余协方差 |
residualmag |
磁强计测量的残差和残差协方差 |
residualaltimeter |
高度计测量的残差和残差协方差 |
构成 |
当前的方位和位置估计 |
重启 |
复位内部状态 |
将stateInfo |
显示状态向量信息 |
例子
无人机的姿态评估
负荷记录传感器数据,地面实况的姿势,并且初始状态和初始状态协方差。计算每高度表样品IMU的样本的数目和每个磁力计样品IMU的样本的数目。
负载('fuse10exampledata.mat',...“imuFs”,'accelData',“gyroData”,...“magnetometerFs”,'magData',...'altimeterFs','altData',...'expectedHeight',“expectedOrient”,...'INITSTATE',“initcov”);imuSamplesPerAlt =修复(imuFs / altimeterFs);imuSamplesPerMag =修复(imuFs / magnetometerFs);
创建一个AHRS过滤器,融合MARG和高度计读数来估计高度和方向。设置传感器的采样率和测量噪声。这些值是通过数据表和实验确定的。
FILT = ahrs10filter(“IMUSampleRate”imuFs,...“AccelerometerNoise”,0.1,...'州'initstate,...“StateCovariance”,initcov);RALT = 0.24;RMAG = 0.9;
预分配变量记录的高度和方向。
numIMUSamples =尺寸(accelData,1);estHeight =零(numIMUSamples,1);estOrient =零(numIMUSamples,1,“四元数”);
保险丝加速度计,陀螺仪,磁力计和高度计的数据。外环预测以最快的采样速率(在IMU采样率)前进的过滤器。
为II = 1:numIMUSamples%使用predict来估计基于加速计的滤波状态%陀螺仪数据。预测(FILT,accelData(二,:),gyroData(二,:));%磁强计数据采集速率低于IMU数据采集速率。保险丝%磁强计数据率较低。如果〜MOD(二,imuSamplesPerMag)fusemag(FILT,magData(二,:),RMAG);结束%高度计的数据被以较低的速率比IMU数据收集。保险丝%高度计数据在较低的速率。如果~国防部(ii, imuSamplesPerAlt) fusealtimeter (filt, altData (ii), Ralt);结束记录当前高度和方向估计。[estHeight (ii), estOrient (ii)] =姿势(filt);结束
计算已知真实高度和方向与AHRS滤波器输出之间的均方根误差。
pErr =期望高度- estHeight;qErr = rad2deg (dist (expectedOrient estOrient));人口、难民和移民事务局(12(平均(穗青葱。^ 2));则=√意味着(qErr ^ 2));流(“高度均方根误差\ n”);
海拔RMS错误
流(' \ t %。2f (meters)\n\n'人口、难民和移民事务局);
0.38(米)
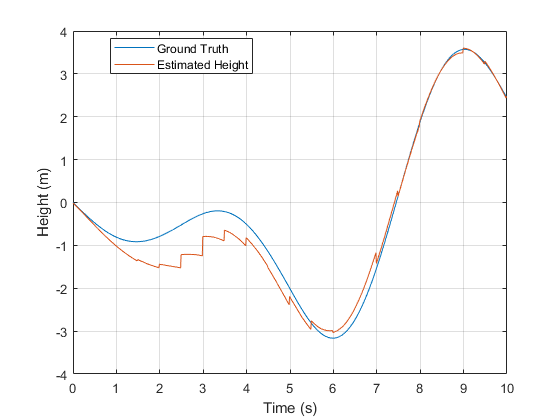
随着时间的推移,想象真实的和估计的高度。
t = (0: (numIMUSamples-1)) / imuFs;情节(t, expectedHeight);上情节(T,estHeight);保持离传奇(“地面真相”,“估计高度”,'位置',“最佳”)ylabel('高度(m)')xlabel('时间(s)')网格上
流(四元数距离均方根误差);
四元数距离均方根误差
流('\吨%.2f(度)\ n \ n',qRMS);
2.93(度)