感应电机
鼠笼式转子感应电机,具有单位或SI参数化
- 库:
Simscape /电气/机电/异步

描述
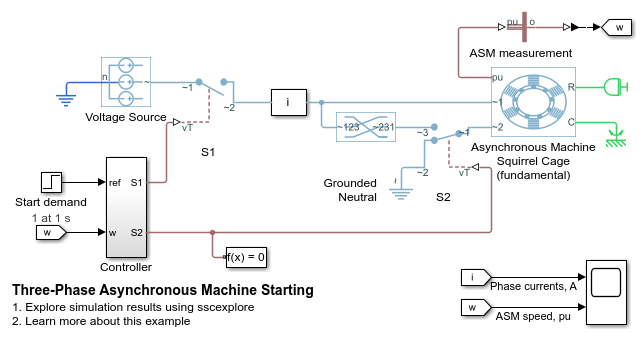
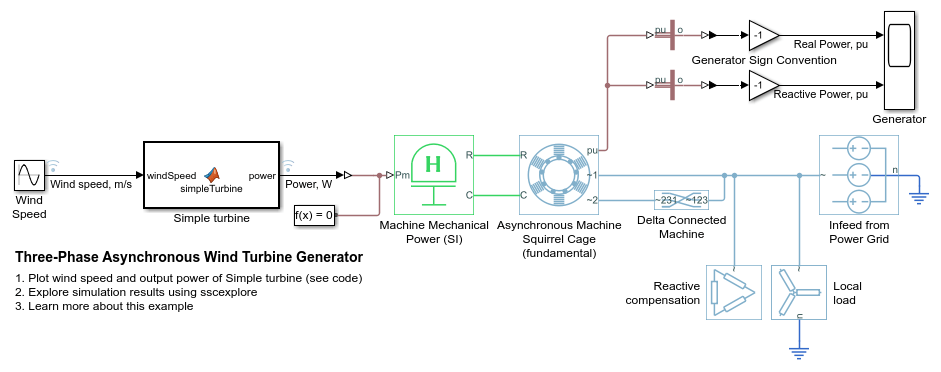
的感应电机块模型的鼠笼转子感应电机的基本参数表示在单位或国际单位制(SI)。鼠笼转子感应电机是一种感应电机。所有定子连接都可以在接线板上进行。因此,您可以使用wye配置和delta配置之间的切换来模拟软启动机制。如果您需要访问转子绕组,请使用感应机缠绕转子块来代替。
连接港口~1到三相电路。要在Delta配置中连接定子,请连接a相交换端口之间的块~1和~2.要连接wye配置的定子,请连接端口~2到一个中性接地(三相)或者一个浮动中性(三相)块。
使用负载流目标值进行感应机初始化
如果块所在的网络与频时仿真模式兼容,则可以对网络进行负荷流分析。负载流分析提供了可用于初始化机器的稳态值。
有关更多信息,请参见使用Simscape Electrice进行负载流分析和频率和时间模拟模式.有关如何使用来自负载流分析的数据初始化感应电机的示例,请参见带有负载流的感应电机初始化.
方程
对于SI实现,该块将您输入的SI值转换为用于模拟的单位值。转换值是基于连接在三角绕组配置中的机器。
对于单位实现,您必须在阻抗选项卡中指定电阻和电感,该选项卡是基于在三角绕组配置中连接的机器。
有关SI和单位机器参数之间关系的信息,请参见机器参数的单位转换.有关单位参数化的信息,请参见单位单位系统系统.
感应机方程是在同步坐标系下表示的,同步坐标系定义为
在哪里f评分为是值的价值额定电流频率参数。
帕克变换将定子方程映射到相对于额定电气频率稳定的参考系。公园转型的定义是
在哪里θe是电角度。
Park变换用于定义单位感应机方程。定子电压方程定义为
和
地点:
vds,vQS.,v0s.是d-轴,问和零序定子电压,定义为
v一个,vb,vc是跨端口的定子电压~1和~2.
ω根据为单位基本电速度。
ψds,ψQS.,ψ0s.是d-轴,问-轴,零序定子磁链。
R年代为定子电阻。
我ds,我QS.,我0s.是d-轴,问的零序定子电流
我一个,我b,我c定子电流是否从端口流出~1港口~2.
转子电压方程定义为
和
地点:
v博士和vQR.是d设在和问-AXIS转子电压。
ψ博士和ψQR.是d设在和问轴转子磁链。
ω是每单位同步速度。对于同步参考帧,值为1。
ωr是每单位机械转速。
Rrd.是转子电阻是否参考定子。
我博士和我QR.是d设在和问设在转子电流。
定子磁通连杆方程由
和
在哪里lSS.定子自感和l米是磁化电感。
转子磁通连杆方程由
和
在哪里lrrd.转子自感是否参考定子。
转子转矩定义为
定子自感lSS.,定子漏电电感lls、磁化电感l米是相关的
转子自身电感lrrd.,转子漏感l上、磁化电感l米是相关的
当提供饱和曲线时,以确定作为磁化通量的函数的饱和磁化电感的等式是:
没有饱和时,方程简化为
绘图和显示选项
您可以使用绘图和显示操作电块上下文菜单上的菜单。
右键单击块,然后从中右键单击电菜单,选择一个选项:
显示基值-在MATLAB中显示机器的单位基值®命令窗口。
图扭矩速度(SI)-使用当前机器参数,在MATLAB图形窗口中绘制扭矩与速度的关系图,均用SI单位测量。
图扭矩速度(pu)-使用当前机器参数,在MATLAB图形窗口中绘制扭矩与速度,均以单位测量。
绘制开路饱和度-在MATLAB图形窗口中绘制终端电压与空载线电流,均为单位。情节包含三个线索:
不饱和-定子磁化电感(不饱和)。
饱和 - 开路查找表(v与我你指定。
由每单元开路查找表导出的开路查找表(v与我你指定。该数据用于计算饱和磁化电感,lm_sat,饱和系数,K年代,相对于磁链,ψ米, 特征。
情节饱和因素-图的饱和系数,K年代,相对于磁链,ψ米,在使用机器参数的MATLAB图形窗口中。此参数来自您指定的其他参数:
无负载线电流饱和数据,我
终端电压饱和数据,v
漏电感,lls
情节饱和电感- 绘制磁化电感,lm_sat,相对于磁链,ψ米,在使用机器参数的MATLAB图形窗口中。此参数来自您指定的其他参数:
无负载线电流饱和数据,我
终端电压饱和数据,v
漏电感,lls
对于SI实施,v是在V(相-相RMS)和我是A (rms)。
变量
使用变量设置来指定在模拟之前块变量的优先级和初始目标值。有关更多信息,请参见设置块变量的优先级和初始目标.
变量中可见的变量类型变量属性中选择的初始化方法主要的设置,为初始化选项参数。使用以下命令指定目标值:
通量变量-设置初始化选项参数到
设置磁通变量的目标.来自负载流分析的数据 - 设置初始化选项参数到
为负荷流量变量设定目标.
如果您选择为负荷流量变量设定目标,要完全指定初始条件,必须包含高优先级目标值形式的初始化约束。例如,如果你的感应电机连接到惯性块,感应电机的初始条件完全指定,如果,在变量设置的惯性块,优先级为旋转速度被设置为高的.或者,你可以设置优先级到没有一个为惯性块旋转速度,而是设置了优先级用于感应电机块滑,真正的权力生成, 要么机械功率消耗到高的.
港口
输入
保护
参数
兼容性的考虑
参考文献
[1] Kundur, P。电力系统稳定性与控制。纽约:McGraw Hill, 1993年。
莱舍夫斯基机电系统,电机和应用机电一体化。佛罗里达州博卡拉顿:CRC出版社,1999年。
Ojo, J. O., Consoli, A.,and Lipo, T. A., "饱和感应电机的改进模型",IEEE行业应用的交易.26卷,没有。2,第212-221页,1990。
扩展能力
另请参阅
Simscape块
块
你也可以从以下列表中选择一个网站: