降低
简化基于Hankel奇异值的模型减少功能
语法
GRED = reduce(G,order) [GRED,redinfo] = reduce(G,'key1','value1',…)
描述
降低返回一个简化的订单模型gre考试的G和结构数组redinfo包含了约简模型的误差界、原系统的Hankel奇异值和其他相关的模型约简信息。
误差界限是衡量距离有多近gre考试是G并基于两个添加误差,∥G-Gred.∥∞,乘法错误,∥G1(g-gred)∥∞,或nugap错误(ref。中心)[1],[4],[5].
稳定系统的汉克尔奇异值表示系统各自的状态能量。因此,可以通过检查系统的Hankel SV来直接确定降阶。基于汉克尔奇异值的模型约简例程根据其误差界类型进行分组。在很多情况下,加性误差法gre =减少(G,顺序)足以提供良好的减少阶模型。但对于具有轻微阻尼杆和/或零的系统,一种乘法误差方法(即,gred = reduce(g,命令,'errortype','mult')),使两者之间的相对误差最小化G和gre考试倾向于产生更好的合适。
此表介绍了输入参数降低.
争论 |
描述 |
|---|---|
G |
要缩减的LTI模型(在没有任何其他输入的情况下,将绘制其Hankel奇异值并提示其订单缩减)。 |
命令 |
(可选)用于简化模型的所需顺序的整数,或可选的包含批处理运行所需顺序的向量。 |
可以通过指定来生成一系列不同减少订单模型的串行运行订单= x, y,或整数向量。默认情况下,物理系统的所有反稳定部分都保留下来,因为从控制稳定性的角度来看,摆脱不稳定状态对系统建模是危险的。
'MaxError.'可以以与相同的方式指定作为替代品'命令'答:'ErrorType'被选中。在这种情况下,当汉克尔SV的尾部之和达到时,将确定降阶'MaxError.'.
争论 |
价值 |
描述 |
|---|---|---|
|
|
默认为 选择 选择 默认为 默认为 |
|
|
添加误差(默认) 模型输出时的乘法误差 ncf nugap错误 |
|
不同误差的实数或矢量 |
降低达到H∞错误。 当礼物, |
|
|
LTI权重的最优1x2单元阵列 |
|
|
显示汉克尔奇异图(默认) |
|
整数、向量或单元格数组 |
简化模型的顺序。仅当没有指定作为第二个参数时使用。 |
原始模型输入和/或输出的重量可以使模型减少算法侧重于某些频率范围的兴趣。但体重必须是稳定的,最小相位和可逆性的。
此表介绍了输出参数。
争论 |
描述 |
|---|---|
gre考试 |
Lti降低了订单模型。当输入是不同模型顺序阵列的串行时,变为多维数组。 |
redinfo. |
一个包含3个字段的STRUCT数组:
|
G可以是稳定的也可以是不稳定的。G和gre考试可以是连续的,也可以是离散的。
用状态良好的原始模型进行成功的模型约简G将确保减少模型gre考试满足Infinity标准错误绑定。
例子
减少模型订单
给定一个连续或离散、稳定或不稳定的系统,G,根据您的选择创建一组减少阶模型。
rng (1234“旋风”);重复性的%g = RSS(30,5,4);
如果你叫降低在不指定简化模型的订单的情况下,软件会显示一个汉克尔奇值图并提示您选择订单。
如果指定缩小模型顺序,降低默认的Balancmr.模型约简算法。
[G1,Redinfo1] =减少(G,20);
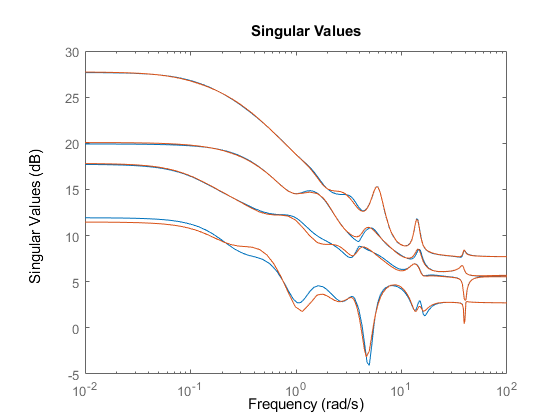
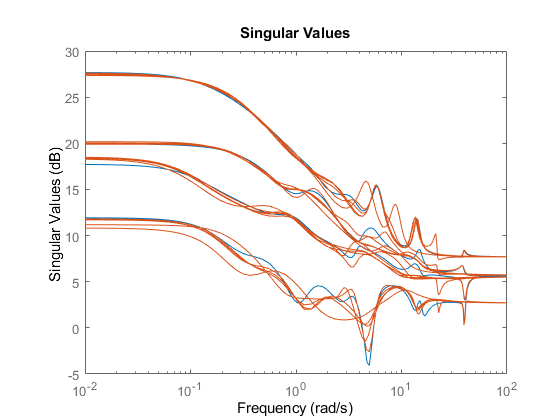
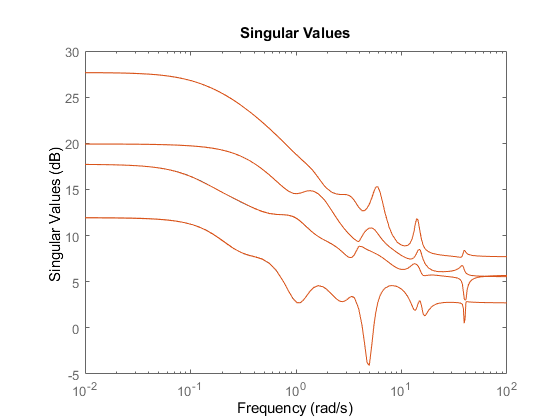
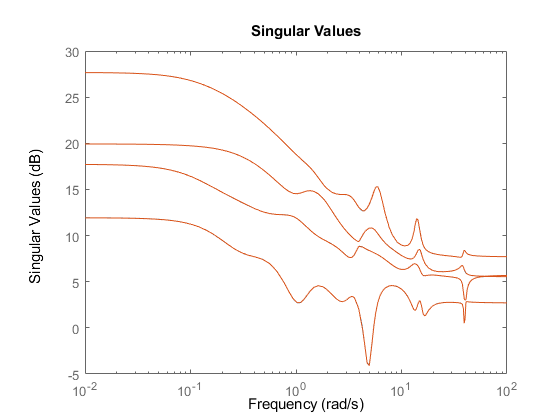
属性指定其他算法算法论点。使用ErrorType参数指定算法是使用乘误差还是加误差,以及简化模型中允许的最大误差。
[g2, redinfo2] =减少(G, [10:2:18],'算法',“舒尔”);[g3,redinfo3] =减少(g,“ErrorType”,“MULT”,“MaxError”[0.01 - 0.05]);[g4, redinfo4] =减少(G,“ErrorType”,“添加”,'算法',“汉高”,“MaxError”,[0.01]);为我= 1:4图(i);eval(['sigma(g,g'num2str(我)');']);结束
参考
[1] K. Glover,“所有最佳Hankel Num近似线性多变量系统,以及它们的L∝-错误边界," Int。《控制》第39卷第2期6、1984年。
[2] M. G. Safonov和R. Y. Chiang,“SCOUR均衡模型减少方法”IEEE Trans。在自动上。对话。,卷。AC-2,没有。7月7日,1989年7月,第729-733页。
[3] M. G. Safonov,R. Y. Chiang和D. J. N. N. Limebeer,“非初始系统的最佳Hankel模型减少”IEEE Trans。在自动上。对话。,卷。35,4,4月4日,1990年4月,第496-50222。
[4] M. G. Safonov和R. Y. Chiang,“鲁棒控制的模型减少:Schur相对误差方法”国际自适应控制与信号处理杂志,第2卷,第259-272页,1988。
[5] K. Zhou, " Frequency weighted L[[BULLET]] error bounds, "系统。来讲,列托人。,Vol. 21, 115-125, 1993.
您还可以从以下列表中选择一个网站: