主要内容
readFrame
读威力登文件点云
语法
描述
ptCloud= readFrame (veloReader)pointCloud对象。
ptCloud= readFrame (veloReader,frameNumber)
ptCloud= readFrame (veloReader,frameTime)frameTime.
例子
使用持续时间从文件读取点云
创建一个velodyneFileReader对象读取Velodyne®数据包捕获(PCAP)文件,并使用持续时间标量。
使用Velodyne®文件读取器读取点云。指定要读取的PCAP文件和Velodyne®设备型号。
veloReader = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);
创建一个持续时间表示第一个点云读取后三秒的标量。
timeDuration = veloReader。开始时间+时间(0,0,3,“格式”,“年代”);
读取在给定时间持续时间或之后记录的第一个点云。
ptCloudObj = readFrame (veloReader timeDuration);
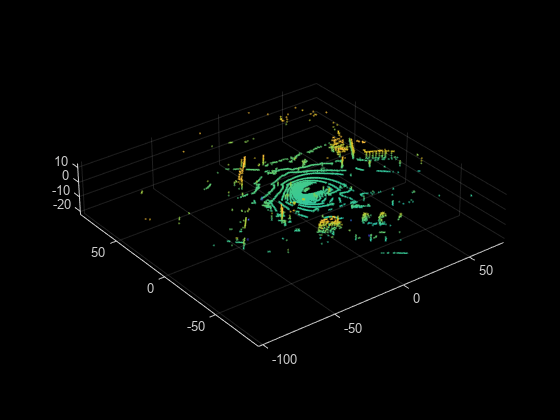
显示点云使用pcshow.
图pcshow (ptCloudObj)
输入参数
输出参数
介绍了R2018a
你也可以从以下列表中选择一个网站:
