编者按:这个文件被选为MATLAB中心本周精选
NXTway-GS是一款两轮自平衡机器人,由乐高Mindstorms NXT和Hitechnic陀螺传感器组成。本演示展示了描述以下内容的示例模型和文档。
如何构建NXTway-GS
NXTway-GS的数学动力学模型
平衡和驱动控制的控制器设计
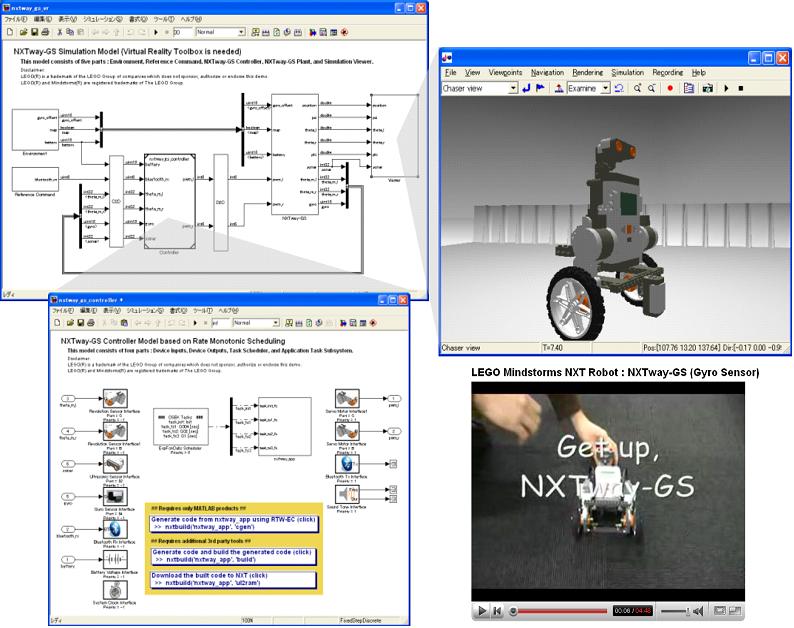
NXTway-GS模型说明
仿真与实验结果
您可以模拟NXTway-GS模型,生成可以在NXT上执行的控制器程序。NXTway-GS模拟和控制实验的电影可以在下面的URL中观看。
http://www.youtube.com/watch?v=EHPlGTLQHRc
http://www.youtube.com/watch?v=4ulBRQKCwd4
本演示使用Embedded Coder Robot NXT demo作为MBD环境。在尝试这个演示之前,您需要从下面的URL下载它。
//www.tatmou.com/matlabcentral/fileexchange/13399
<免责声明>
乐高(R)是乐高集团公司的商标,不赞助、授权或支持本演示。乐高(R)和Mindstorms(R)是乐高集团的注册商标。
引用作为
山本Yorihisa(2021)。NXTway-GS(自平衡两轮机器人)控制器设计(//www.tatmou.com/matlabcentral/fileexchange/19147-nxtway-gs-self-balancing-two-wheeled-robot-controller-design), MATLAB中央文件交换。检索.
MATLAB版本兼容性
平台的兼容性
窗户 macOS Linux标签
确认
启发:嵌入式编码器机器人NXT演示,NXT SCARA (Two-Link Planar Robot Arm)控制器设计,NXT Ballbot(球上自平衡机器人)控制器设计
启发:乐高Mindstorms EV3 Gyroboy,陀螺男孩-基于乐高EV3的自平衡两轮机器人,嵌入式编码器机器人NXT演示,NXT SCARA (Two-Link Planar Robot Arm)控制器设计,NXT Ballbot(球上自平衡机器人)控制器设计,虚拟乐高实时目标,NXTbike-GS(转向摔倒自平衡自行车机器人),NXT-LTD:线跟踪舞蹈机器人演示