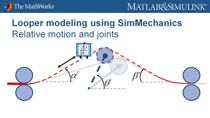
强调
- 定义使用MATLAB®变量参数化的主体
- 装配有接头的阀体
- 在Simulink®中模拟多体动态金宝app
- 查看模拟结果的3D动画
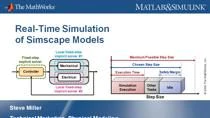
关于演示者
Steve Miller负责Mathworks的Simscape产品系列的技术营销。史蒂夫于2005年加入Mathworks。在此之前,史蒂夫在制动控制系统和MSC.Software Adams咨询了Delphi汽车,以福特,通用汽车,现代,宝马和奥迪的各种能力咨询。史蒂夫有一个B.S.在康奈尔大学机械工程中和M.S.斯坦福大学机械工程中。
您还可以从以下列表中选择一个网站: