主要内容
pcregistercpd
使用CPD算法注册两点云
语法
描述
例子
使用CPD算法对齐两点云
将点云数据加载到工作区中。从工作空间中的点云数据中提取移动点云和不动点云。
handData =负载(“hand3d.mat”);moving=handData.moving;fixed=handData.fixed;
为了提高CPD配准算法的效率和精度,对移动和固定点云进行降采样。
movingDownsampled=pcdownsample(移动,“网格平均”, 0.03);fixedDownsampled = pcdownsample(固定的,“网格平均”, 0.03);
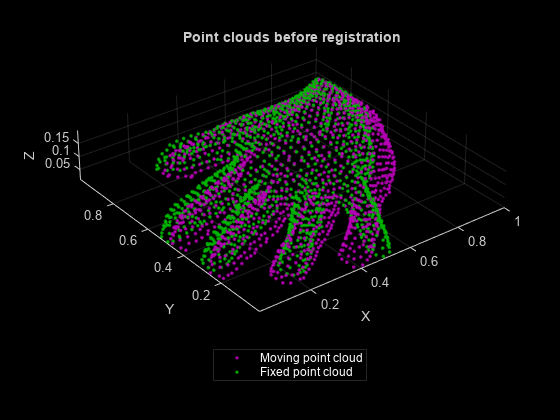
在注册前显示下采样的点云。
图pcshowpair (movingDownsampled fixedDownsampled,“MarkerSize”, 50)包含(“X”) ylabel (“Y”)兹拉贝尔(“Z”)标题(“注册前的点云”)({传奇“移动点云”,“定点云”},“文本颜色”,“w”)传奇(“位置”,“南外”)
使用CPD算法执行非刚性配准。
tform = pcregistercpd (movingDownsampled fixedDownsampled);movingReg = pctransform (movingDownsampled tform);
注册后显示下采样点云。
图pcshowpair (movingReg fixedDownsampled,“MarkerSize”, 50)包含(“X”) ylabel (“Y”)兹拉贝尔(“Z”)标题(“注册后的点云”)({传奇“移动点云”,“定点云”},“文本颜色”,“w”)传奇(“位置”,“南外”)

输入参数
输出参数
算法

参考文献
Myronenko, A.,和X. Song。点集配准:相干点漂移IEEE模式分析和机器智能交易记录(TPAMI)第32卷第12期,2010年12月,第2262-2275页。
扩展能力
另见
功能
pcregistercorr|pcregistericp|pcregisterndt|pctransform|pcshow|pcshowpair|下采样|pcfitplane|pcdenoise|pcmerge
物体
在R2018b中引入
你也可以从以下列表中选择一个网站:
