主要内容
pcregisterndt
用NDT算法配准两点云
语法
描述
例子
使用NDT算法对齐两个点云
加载点云数据。
ld =负载(“livingRoom.mat”); moving=ld.livingRoomData{1};fixed=ld.livingRoomData{2};pcshowpair(移动、固定、,“垂直轴”,“是的”,“垂直方向”,“向下”)
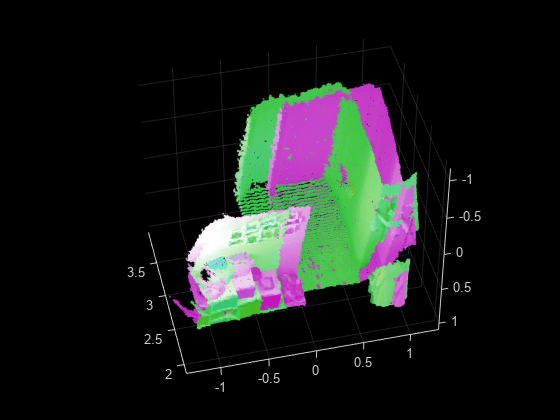
为了提高NDT配准算法的效率和精度,对运动点云进行降采样。
movingDownsampled=pcdownsample(移动,“gridAverage”, 0.1);
将点云体素化成边长0.5的立方体。使用NDT算法应用刚性配准。
gridStep=0.5;tform=pcregisterndt(移动下采样,固定,gridStep);
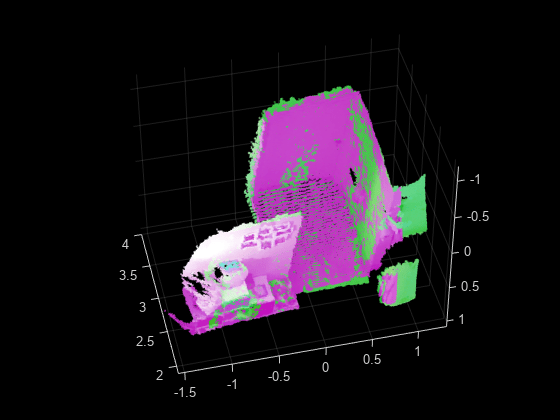
可视化对齐。
movingReg = pctransform(移动,tform);pcshowpair (movingReg,固定,“垂直轴”,“是的”,“垂直方向”,“向下”)
输入参数
输出参数
算法

兼容性考虑
参考文献
[1] Biber,P.和W.Straßer。“正态分布变换:激光扫描匹配的新方法。”IEEE/RSJ智能机器人和系统国际会议记录(IROS)《内华达州拉斯维加斯》,第3卷,2003年11月,第2743-2748页。
[2] Magnusson, M.“三维正态分布变换——配准、表面分析和环路检测的有效表示”博士论文。Örebro大学,Örebro,瑞典,2013。
扩展功能
另请参阅
功能
对象
介绍了R2018a
您还可以从以下列表中选择网站:
