 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 在simuli金宝appnk上的家伙
在simuli金宝appnk上的家伙 深度学习
深度学习 开发人员区
开发人员区 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在某地面
汉斯在某地面 学生休息室
学生休息室 初创公司,加速器和企业家
初创公司,加速器和企业家 MATLAB社区
MATLAB社区 matlabユーザーコミュニティー
matlabユーザーコミュニティー
MATLAB R2019b机器人有什么新功能?
在MATLAB R2019B中,有主要产品更新和新工具箱。你可以看看发行说明但这个博客有我发现的最令人兴奋的功能,并且与机器人和自主系统相关。
机器人仿真
机器人系统工具箱为不同类型的机器人保留专门的建模和仿真工具集合。它特别关注于提供低保真度机器人模型,其中低级控制代表了现实系统,因此您可以快速测试用于运动规划、任务规划和行为的高级算法。此外,还有更详细的分析工具,为低级控制设计工作流提供支持。金宝app
操纵者
现在有一个商业机器人模型图书馆,低保真关节空间和工作空间捕获常见闭环控制策略行为的运动模型碰撞检测在简单的形状或网格之间。所有这些都与运动学和动力学分析工具和轨迹规划工具集成,这些工具已经存在于机器人系统工具箱的以前版本中。
一定要检查新的机器人机械手的例子,范围从基本轨迹规划来完成提货地点任务计划.

地面车辆/移动机器人
对于移动机器人,有新的低保真度运动模型适用于不同类型的移动平台——最常见的是差动驱动和类似汽车的车辆。这些模型可以与导航工具箱中包含的传感器模型和路径规划器(详见下一节)连接,以实现自主导航算法的原型。它们还可以用于设计基于模型的路径规划器和跟踪器,例如模型预测控制.
一定要看看新的仓库机器人的例子,从单个机器人的基本路径规划来一群机器人的任务规划与协调.

露台Cosimulation
现在有一个直接的接口在Simulink和金宝app露台模拟器.
过去我们已经能够通过ROS连接到Gazebo,但现在有了直接的接口,Simulink模型可以驱动Gazebo世界的执行,所以两种工具的动态总是同步的。金宝app这将使您能够使用Simulink进行设计金宝app控制算法尽管获取合成传感器数据(如图像和激光雷达)来自凉亭。
我个人最喜欢的技术应用是对强化学习(RL)代理的训练,这通常需要在一个时间步骤的动作导致下一个时间步骤的观察。下面是我训练一个模拟的尝试Kinova Gen3机器人手臂将其夹持器放置在物体附近深度确定性策略梯度(DDPG)算法.以Gazebo作为我的环境,观察输入包括来自臂式摄像机的图像,所以我可以训练代理人基于卷积神经网络(CNNS).

在下面了解更多关于机器人系统工具箱的信息。
导航与运动规划
对自主导航技术的需求存在于各种类型的平台上,无论是移动机器人、机械手、类人机器人、自动驾驶汽车,还是任何其他自动车辆(空中、太空、陆地、水上或其他)。
导航的工具箱包含一堆横跨任何通用系统的导航工作流程的算法。这个工作流程大致可以分解为本地化和映射(以及合并的SLAM),路径规划, 和路径跟踪(包括避障)。这个版本中最重要的更新是映射和路径规划,但我鼓励您仔细阅读导航工具箱文档页所以你可以看到所有可用的东西。
主要的新映射特性是Egocentric占用地图,亦称当地的地图.以自我为中心的地图通常是基于机器人坐标系的较小区域(与完整的全局地图相比)。这些地图的设计是为了使机器人能够有效地与周围环境一起移动。全局地图用于从起点到目标的路径规划,局部地图通常出现在路径跟踪任务中,如路径校正或避障。

左:一个模拟机器人沿着全球占用地图规划的路径行走。[右]模拟机器人的激光雷达扫描生成的以自我为中心的占用地图。
还有一个新的例子利用激光雷达点云进行三维SLAM展示了如何将3D占用映射和姿势图带来了MATLAB中的点云处理能力。

导航工具箱包含基于采样的路径规划仪,例如杂交A *和快速探索随机树.不像概率路线图(PRM)规划者已经存在于以前的版本中,这些新的规划者能够处理非完整约束-简单地说,他们可以取样与真实系统约束一致的运动,如汽车机器人的最小转弯半径,或多连杆机器人的无碰撞配置。

[左]路径规划与RRT *用于有限转向半径有限的汽车的车辆。[右]混合A *规划自动停车操纵的汽车样车
关于导航工具箱的令人兴奋的事情(对我)是,它的路径规划基础架构已经设计为初学者和开发人员。虽然将有一些内置公用事业的常见问题(如图2D汽车类似车辆的路径规划),但整套状态空间,状态验证器和规划仪是可定制的。有一些示例包括这表明这一点,例如a着名的“钢琴动机问题”的变异和基于RRT的碰撞感知机械手运动规划.

了解有关以下导航工具箱的更多信息。
ROS的连接
与ROS连接和节点部署相关的所有内容现在都打包到新版本中ROS工具箱.
主要更新是ROS工具箱支持ROS和金宝appROS 2!由于ROS 2被设计为支持最流行的操作系统,包括Windows金宝app 10、OS X El Capitan和Ubuntu 16.04和18.04,ROS工具箱直接在所有这些操作系统中使用本地ROS 2库。
您将在ROS工具箱中看到一些应用程序示例,包括签署后的机器人和自动化停车剂代客.两个示例都具有展示MATLAB和SIMULINK工作流程的变体,与ROS和ROS 2。金宝app
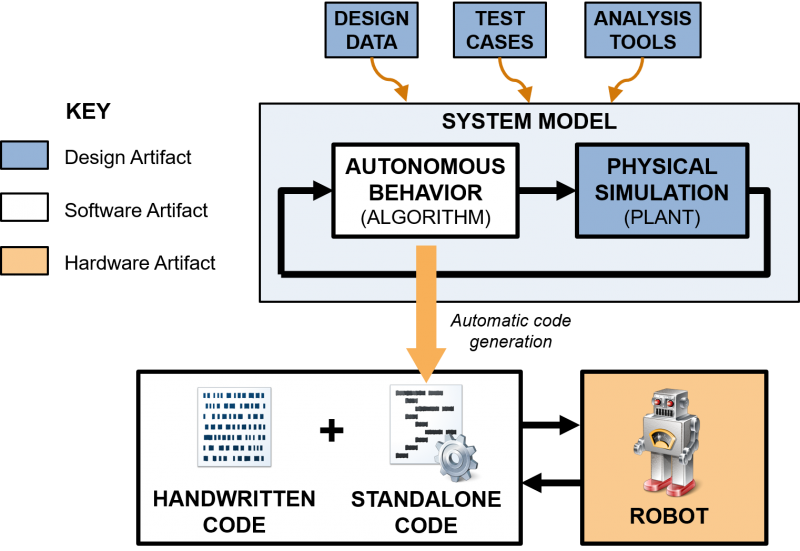
在未来,计划是跟上ROS和ROS 2的长期支持版本,并充实MATLAB和Simulink为中心的开发中的可用功能。金宝app金宝app这包括使用ROS包日志文件,通过桌面模拟创建原型,最后生成独立可执行节点的分布式网络,这是部署ROS启用系统的通用设计范例。
了解更多关于ROS工具箱的信息。
如何了解更多
现在我们已经简要介绍了一些新功能,我们希望您能看到这些新的和更新的工具箱中的完整特性列表,并尝试任何相关的示例。要尝试露台协同模拟和ROS 2连接,您可以下载我们的新虚拟机映像它安装并配置了所有这些工具。
我们也有兴趣听取您的意见。
- 你在做什么机器人项目?
- 你最感兴趣尝试哪些新功能?
- 什么都仍然遗漏,可以帮助你完成你的工作吗?
如果你有任何问题,你可以随时留下评论或联系我们roboticsarena@mathworks.com或者Facebook.






注释
要留下评论,请点击这里登录到您的MathWorks帐户或创建一个新帐户。