 克里夫角:克里夫·摩尔论数学与计算
克里夫角:克里夫·摩尔论数学与计算 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 深度学习
深度学习 开发区
开发区 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周文件交换精选
本周文件交换精选 物联网上的汉斯
物联网上的汉斯 学生休息室
学生休息室 创业公司、加速器和企业家
创业公司、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
来自VEX-U竞赛决赛选手的机器人编程见解
对于本周的博客文章,我们邀请了来自墨西哥阿尔塔米拉技术大学的VEX大学团队,分享他们为成为VX机器人竞赛的国家入选者的旅程。如往常一样,如果您是VEX社区的一员,并且希望为您的机器人使用MATLAB和Simulink,请访问我们的金宝app烦恼机器人页面或联系我们roboticsarena@mathworks.com. MathWorks为他们的成就感到无比自豪,我们希望你们也能发现他们的见解很有用!有了这些,我将把它交给塔尔机器人公司的杰斯·海拉姆·艾米雷和曼努埃尔·亚历杭德罗·洛佩兹。
介绍
几年来,我们的大学一直是维克斯机器人竞赛——维克斯大学联盟的一部分,但在过去的两年中,我们决定在我们的开发过程中做出一些改变。其中一个变化是使用MATLAB和Simulink作为我们开发机器人的编程环境。在过去的两年中,我们在比赛中的表现比过去几个赛季有所提高。使用Simulink,我们迅速为我们的机器人开发了大量高效的自主和驱动控制器,其中每个按钮都经过编程以执行特定任务。我们发现,使用基于模型的设计方法大大节省了我们的编程和调试时间,然后我们可以投资于改进设计的其金宝app他方面,使我们的机器人更具竞争力。在这个博客中,我们将回顾我们的一些机器人设计,并解释我们发现对编程不同类型的机器人行为有用的工具。
我们的团队——塔尔机器人公司——Tecnológico de Altamira

TAL机器人团队
在赛季开始时,我们的团队分析了不同的策略、机制、电机和传感器配置,我们有兴趣将其纳入我们的设计中。这有助于我们估计在第一季赛事前至少三周完成竞争机器人开发所需的工作量。我们在2019年9月的2019-2020塔楼接管季节开始工作,并在2020年的VEX U墨西哥国家赛事中进入决赛。我们的两个机器人由5名学生组成的团队制造,每个团队的成员都有特定的角色,如编程、设计、构建和驾驶。这些团队还包括来自不同工程学科的学生。
我们的机器人
我们的第一个机器人是一个24x24x24英寸的大机器人,它最初是一个带有气动进气的双倒四杆机器人。第一个机器人的主要任务是一次收集4个立方体,目标是在联盟目标中超过15英寸托盘机器人的塔。整个季度,设计变成了一个24英寸的托盘机器人,能够在托盘中收集多达12个立方体,在它的最终形式是由以下组成:
- 6个电机200 rpm 1:1传动系
- 1个电机100转/分1:5臂
- 2马达100转1.5:1进气辊
- 1马达200转1:12托盘
- 1气动活塞立方体锁

塔尔机器人公司24英寸和15英寸机器人
机器人的目标是平衡功率和效率;我们需要的是能够在不过度拉紧发动机的情况下尽可能多地加速。
我们的第二个较小的机器人是15x15x15英寸的机器人,开始和结束时都是一个小托盘机器人。它能够捡起8个立方体,并毫无问题地将它们堆放在一个角落里。为了能够收集这些立方体,在每一场比赛开始时,它都是一个完美的15英寸立方体,然后扩展到完整的真实形状。这是robot仅使用以下方法制作:
- 4电机200转/分1:1驱动
- 1马达200转1:12托盘
- 2马达200转1:1进气辊
机器人控制
自主和驾驶员控制模式的手柄编程设计是使用Simulin金宝appk的VEX V5支持包金宝app.这些算法包括驾驶员可以控制的所有自主和半自主行为。

金宝app驾驶员控制的Simulink模型
我们实现了状态流程图,在驾驶员控制期间,通过手柄按钮控制任务自主权。statflow中基于图的方法使得跟踪开关逻辑(如阀门激活)变得很容易。
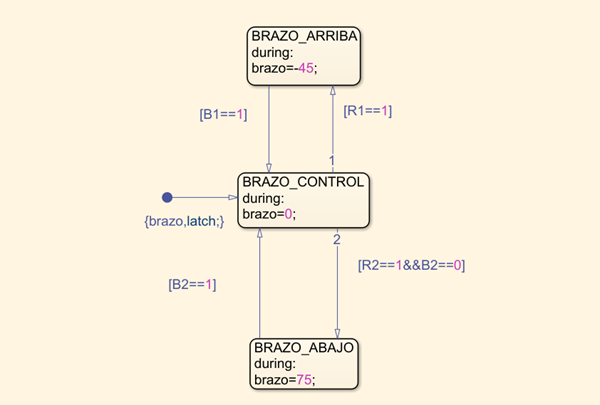
Arm控制的状态流程图
对于比赛的自主阶段,我们还使用了状态流程图,因为它们允许我们轻松编程等待时间和连续函数之间的转换。使用不同的操作状态是有用的,当连续执行任务时,考虑诸如机器人的重量或传感器扰动之类的动态条件。最后,避免编写长代码行,而是将行为组织到图表中,这在节省编程时间和提高竞争力方面起到了很大的作用。
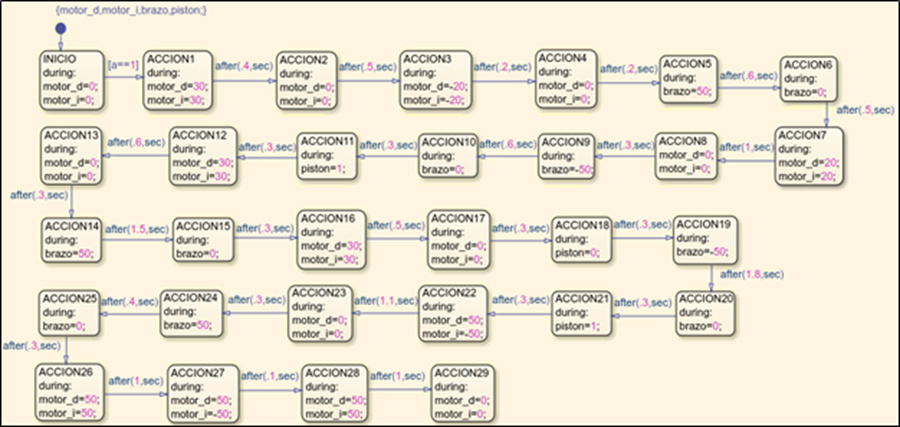
Stateflow中的顺序自治模式算法
随着我们使用MATLAB获得更多经验,我们将我们的自主实现更改为MATLAB功能块,因为我们主要是在没有并行算法的情况下对任务序列进行编程。然而,我们保留了状态流程图,用于自动执行具有切换行为的特定操纵杆任务。这就是我们如何获得使用功能块和案例组合使用多个传感器在闭环中执行任务。该算法可以检测现场条件并决定下一个动作;结果是自治部分的性能更好,在比赛规定的时间内完成任务。
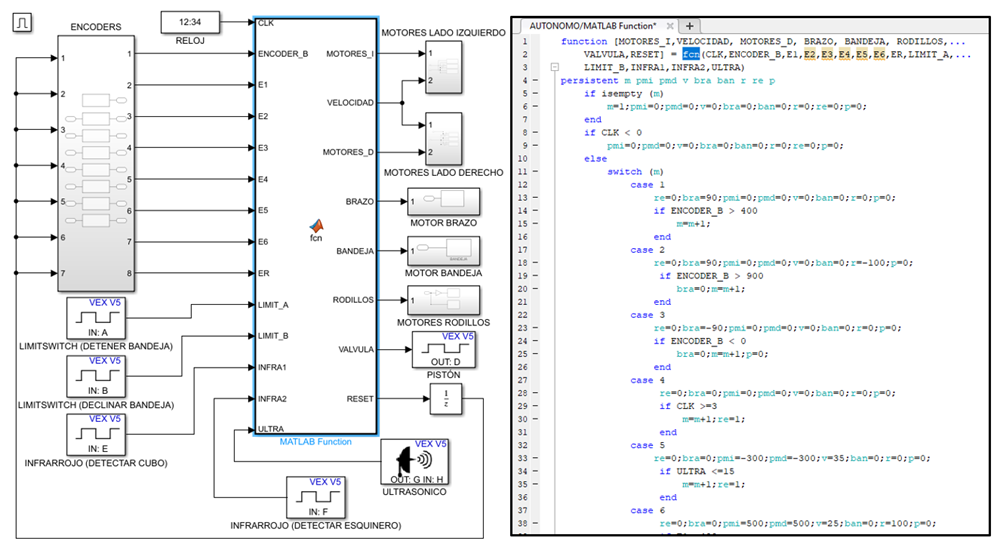
结合Simulink和MATLAB的自主控制金宝app
总而言之,我们的自主程序包括在45秒内收集最多数量的立方体,并把它们放在球场指定的位置。这些都是由MATLAB函数块处理的;使用位置关闭控制回路是一个非常重要的元素,以便在分配给塔的点上留下砖块。函数块为我们提供了一种实用的方法,在不增加任何延迟或降低性能的情况下,在保持我们所寻找的实时执行的同时,集成我们想要的代码。

机器人在行动
墨西哥国民
最后,有一天,所有的辛勤工作投入到机器人不仅编程,而且设计,建造和驾驶的时间都被投入到测试中。在两天的比赛中,我们10场比赛中赢了9场。这是一种无法形容的感觉,我们所有的努力都让我们骄傲地站在墨西哥全国锦标赛的领奖台上,排名第二。
作为一个团队,我们为了一个共同的目标一起工作,互相帮助,并在这个过程中获得经验。最后,事实证明,我们不仅仅是一个团队,我们成了一家人。在一起的时间告诉我们,无论如何,我们都可以面对面前的任何障碍,良好的沟通和倾听所有团队成员的意见。形容我们团队的最佳词汇是“享受”。我们总是百分之百地享受这一刻,这就是我们,我们的团队总是从所有的经验中学习,无论是好的还是坏的。
在我们看来,维克斯- u的决赛和整个比赛都很有趣。我们一起走过了所有的比赛周期,享受着经验,并为我们的工作感到自豪,我们希望你也一样。
- Tecnológico de Altamira - VEX大学队- Jeus Hiram Almiray Hernández - Manuel Alejandro Lopez Flores








评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。