 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティーPID控制变得简单
今天我介绍一位客座博主阿卡迪·图雷夫斯基要共享R2009b中的一些新功能:PID控制器模块在里面金宝app和一个新的PID调优方法在里面金宝app仿真软件控制设计.

PID(比例积分微分)控制看起来很简单:你只需要找到三个数字:比例增益、积分增益和导数增益。存在许多PID调优规则,您所需要做的就是拿起一个并按下计算器上的按钮。足够简单,对吗?不幸的是,事情远比这复杂。流行的PID调优方法是有限制的。例如,要使用最流行的一种方法—齐格勒-尼科尔斯—您需要一个稳定的、一阶加死时线性时不变(LTI)植物模型。即使您的模型属于这种类型,该方法也不支持整型或比例导数控制器的整型,对于它支持的PID控制器类型,它只提供了一个金宝app答案,没有简单的方法来微调设计。此外,调音并不是唯一的挑战。现实生活中的PID实现还需要考虑输出饱和、积分器上卷、离散时间实现等问题。
在R2009b中,我们在Simulink中发布了新的模块,并在Simul金宝appink控制设计中发布了一种新的PID调整方法,共同解决了这些挑战。为了看看这是如何工作的,让我们考虑一个例子,设计一个PID控制器的直流电动机。闭环系统的模型使用新的PID控制器块。该模块产生电压信号,驱动直流电机跟踪所需的轴转速。除电压外,直流电机子系统还将转矩干扰作为输入,使我们能够模拟控制器抑制干扰的效果。我们还对速度测量中的模拟传感器噪声进行了建模。

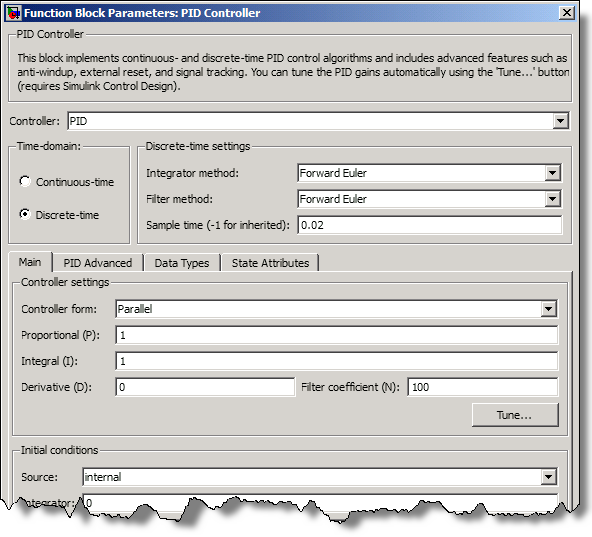
PID控制器为离散时间控制器,运行时间为0.02秒(红色表示模型中的采样时间)。现在让我们看看PID控制器模块的对话框。在对话框的上半部分,我们指定了PID控制器的基本配置:类型(PID, PI, PD, P,或I),时域,积分方法和采样时间。在下面的部分,我们指定了PID控制器形式和增益(显示在默认值)。块文档提供关于块及其所有参数的详细信息。
PID调节
我们的第一个任务是调整PID控制器。按下PID Controller模块对话框中的“Tune…”按钮,我们启动PID Tuner,它在默认工作点线性化模型,并自动确定PID控制器增益,以实现基于线性化的对象模型的合理性能和鲁棒性。
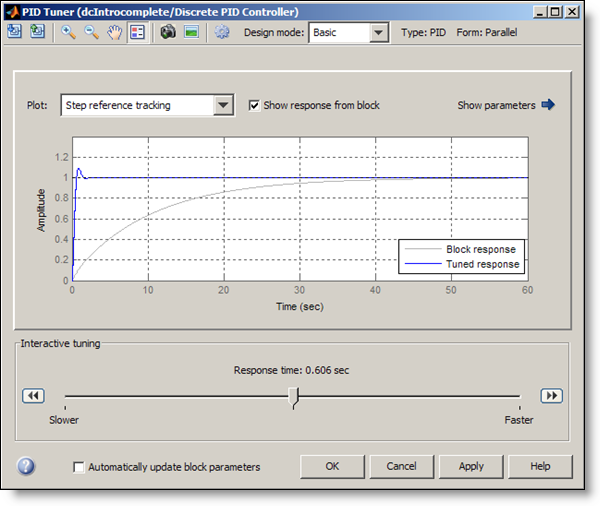
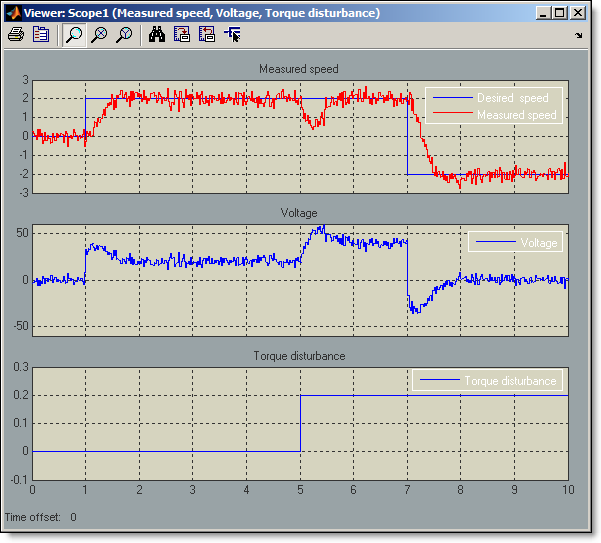
灰线显示块对话框中当前定义的增益值的系统阶跃响应,蓝线显示PID Tuner建议的增益值的系统响应。我们可以简单地接受建议的设计,然后运行闭环Simulink模型来检查结果。在模拟中,我们命令在1秒时从0变为2 rpm,在7秒时降到-2 rpm。结果表明,在零稳态误差、快速上升时间、低超调量和良好的转矩干扰抑制(转矩干扰被建模为5秒时从0到0.2牛顿米的阶跃变化)下具有良好的跟踪性能。我们刚才使用的调整算法适用于任何类型的设备模型,调整可以在PID控制器块中指定的所有形式的PID控制器,并在调整过程中考虑采样效果。金宝app
如果系统响应不满足我们的要求,我们可以使用PID Tuner GUI底部的滑块,通过交互使控制器更快或更慢,进一步微调设计。
积分器抗饱和保护
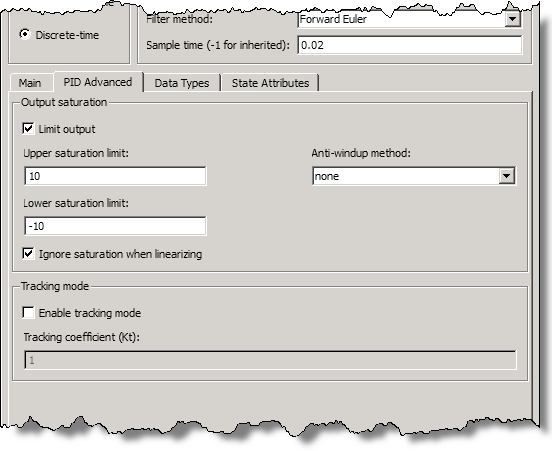
我们现在运行一个不同的场景,假设没有扭矩干扰,并假设馈电到直流电机的电压幅值不能超过10伏,以保护电机不过热。我们使用PID控制器对话框的“PID高级”选项卡来指定这些饱和限制。

我们看到,在第一步的时间变化在1秒,电压信号从控制器饱和在10伏特。当所需的速度下降在7秒,电压不会立即下降,并停留在10伏特几乎2秒。这是PID控制器积分器上卷的结果,导致跟踪速度命令时产生不希望的延迟。它可以通过在PID控制器模块对话框中启用积分器反上发条来修复。重新运行与积分器反windup使能的模拟,我们看到控制器仍然不能达到命令的速度值2 rpm -它只是没有足够的权威,但当速度被命令到-2 rpm,控制器迅速响应在要求的速度变化。

正如我们所看到的,新的PID调整方法和新的PID控制器块帮助我们快速调整PID控制器,并创建一个解决输出饱和和积分结束问题的离散时间设计。
现在轮到你了
你用PID控制吗?如何解决集成商破产的问题?留下一个评论这里告诉我们你是如何调整控制器增益的。






评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。