 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 洛伦谈MATLAB的艺术
洛伦谈MATLAB的艺术 MATLAB在图像处理中的应用
MATLAB在图像处理中的应用 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 标题背后
标题背后 本周最佳文件交换选择
本周最佳文件交换选择 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー用Simulink编程一个鹦鹉微型无人机金宝app
你知道我这周末做了什么吗?是的,正如这篇文章的标题所说,我部署了自定义飞行控制软件鹦鹉滚蜘蛛迷你无人机
金宝appParr金宝appot微型无人机Simulink支持包
去年圣诞节,我女朋友送了我一台鹦鹉滚蛛迷你无人机。

立刻,我觉得用Simulink编程会很酷。当时,我做了一些研究,安装自定义固件并将所有必要的代码粘合在一起听起来相当复杂金宝app。
现在不是了,最近发布的鹦鹉小型无人机支持包。金宝app
今天我将描述我第一次使用这个软件包的经历。
安装
要开始,请从MatlabToolStrip打开附加模块资源管理器。
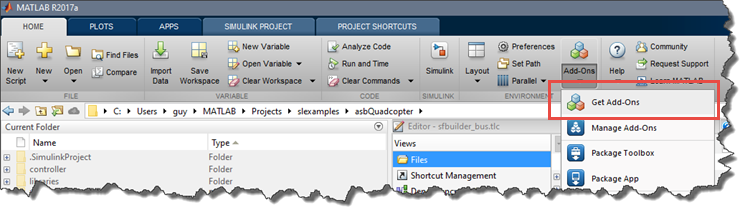
在资源管理器中,搜索“Parrot Minidrone”,单击安装,并按照说明操作。安装包后,安装程序将指导您完成硬件设置。
此设置将首先更新minidrone固件。请注意,固件更新后,您将无法再从智能手机应用程序中驾驶minidrone。正如我的一位同事喜欢说的那样:当您更新固件时,您正在将玩具转换为实验设备。
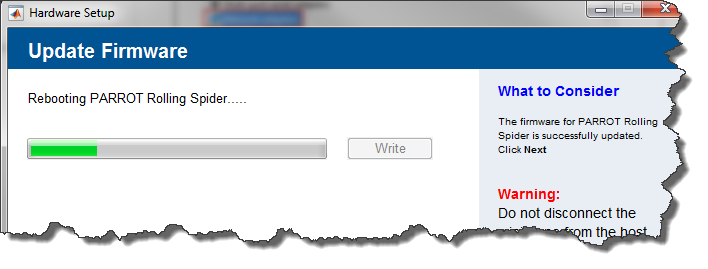
如果你想把你的迷你无人机带回到“玩具模式”,你需要去鹦鹉的网站并按照说明重置原始固件。
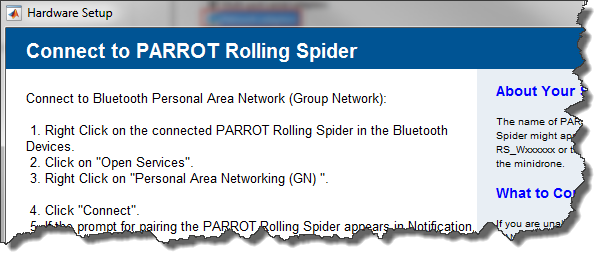
固件更新后,您需要通过蓝牙连接到微型无人机。再次,硬件设置窗口将引导您完成所有步骤:
第一个测试
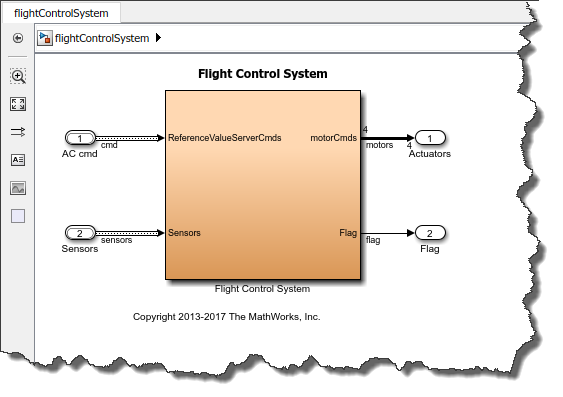
开始编写迷你无人机的最好方法是使用四轴飞行器项目,包括在航空航天Blockset.在MATLAB中,输入asbQuadcopterStart打开示例。
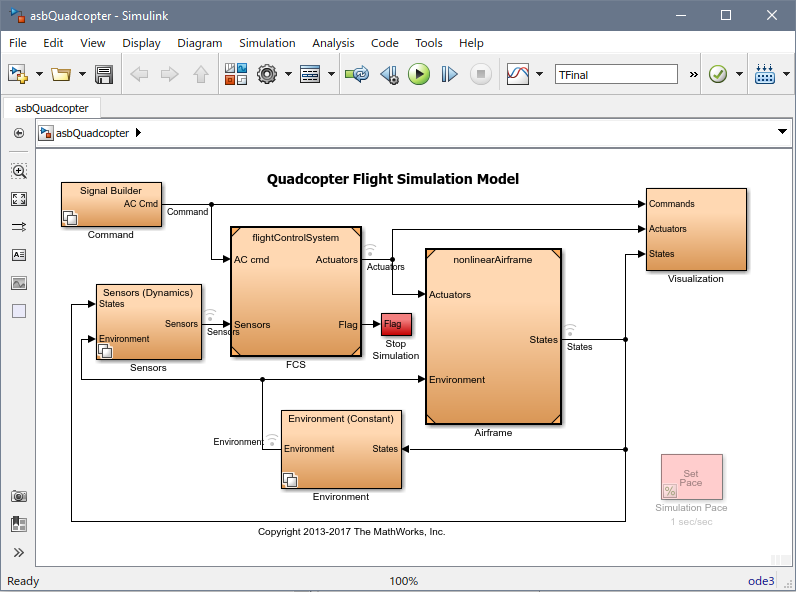
这个例子是一个鹦鹉微型无人驾驶飞机的完整模拟。可以想象,我们不会为整个模型生成代码。我们想要的是为模型生成代码flightControlSystem.slx,由FCS块引用。
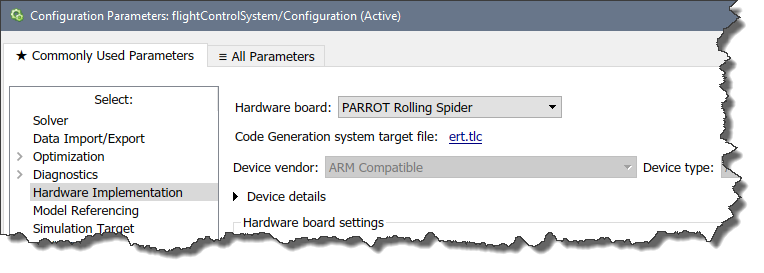
在Simuli金宝appnk项目中,单击名为设置鹦鹉目标
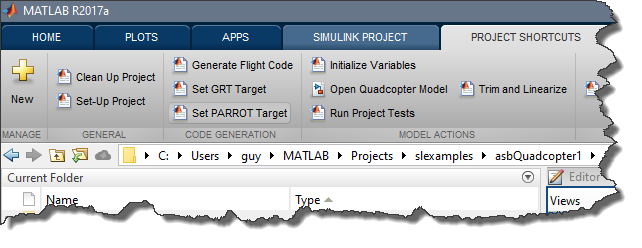
这将在模型配置中设置一些东西,以使生成的代码与minidrone兼容。
在模型中,单击Build按钮生成代码。代码生成完成后,转到MATLAB提示符连接到minidrone,并开始执行代码。
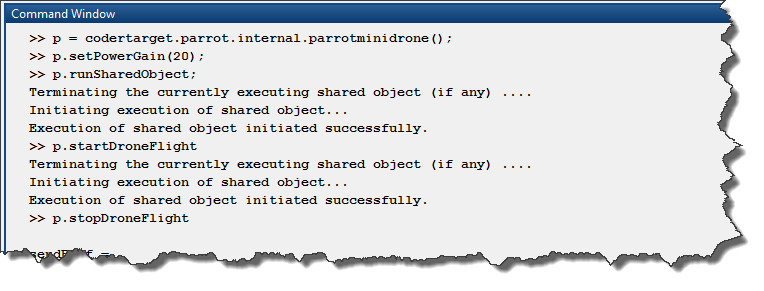
对于第一个测试,该行p、 设置功率增益(20)可能是个好主意。它会指示无人机使用20%的可用电力。这样,无人机不会飞起来,但电机会移动,以确认代码正在运行。
下一步是什么?
按照工作方式,定制固件需要一个具有特定功能和签名的库。在示例模型中,在两个根级别的输入端口上指定了两个总线对象,这两个总线对象与预期的签名匹配。作为输出,预计有4个功率指令的矢量,每个电机一个。
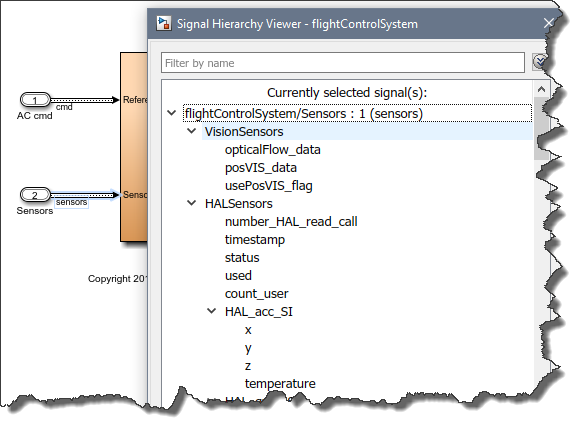
为了熟悉所有可用的传感器,我建议在模型配置中启用MAT文件日志记录,并使用模型中的工作区块来记录传感器信号。在您的航班终止后,您将能够执行Executep.getMatFile从无人机上取回记录的信号并进行分析。
我第一次坐飞机
确认我可以改变模型并看到效果,我使用信号生成器命令无人机在一个固定的高度飞行并向左和向右移动。下面是它的实际效果:
现在轮到你了
安装金宝appParr金宝appot微型无人机Simulink支持包让我们知道您是否能够提高飞行控制器的稳定性,或者使用向下指向的摄像头实现线跟踪或目标跟踪等酷炫功能。








评论
如需留言,请点击在这里登录到您的MathWorks帐户或创建新帐户。