 克利夫角:克利夫·莫尔谈数学和计算机
克利夫角:克利夫·莫尔谈数学和计算机 罗兰关于MATLAB的艺术
罗兰关于MATLAB的艺术 用MATLAB进行图像处理
用MATLAB进行图像处理 人在仿真软件金宝app
人在仿真软件金宝app 深度学习
深度学习 开发区域
开发区域 斯图尔特的MATLAB视频
斯图尔特的MATLAB视频 在标题后面
在标题后面 本周文件交换精选
本周文件交换精选 汉斯在物联网
汉斯在物联网 学生休息室
学生休息室 初创企业、加速器和企业家
初创企业、加速器和企业家 MATLAB社区
MATLAB社区 MATLABユーザーコミュニティー
MATLABユーザーコミュニティー
如何使用MATLAB和Simulink赢得方程式巴拉特金宝app
今天的帖子,我想向你介绍Raftar公式赛车从印度理工学院马德拉斯.他们最近赢得了巴拉特公式2020年在燃烧类。该团队将分享他们使用MATLAB和Simulink进行车辆设计的经验。金宝app非常感谢,舞台是你们的!

介绍
MATLAB, 金宝appSimulink和Simscape已经证明对理解我们的Formula Student赛车是有益的,并帮助我们做出和验证关键的设计决策。使用正确的工具,给了我们竞争优势,这是我们最近在巴拉特公式2020.
上的模拟
为确定车辆参数对车辆在赛道上整体性能的影响,利用MATLAB进行了单圈时间仿真。目标是建立一个模型,可以用来为车辆做出高层决策,包括对整个圈速的影响。例如,增加重量的影响,提供更好抓地力的一套新轮胎,以及考虑阻力和下压力的空气动力学套件。该问题包括两个部分:轨道建模和车辆在轨道上的行为建模。
在研究所设置了195米的赛道,用于车辆模型验证和比较不同的驾驶员和车辆设置。每个点的x-y坐标和曲率是模型中使用的轨迹数据输入。轨迹数据使用GPS记录仪记录,以计算每个点的曲率半径。在每个点的速度计算使用自行车模型假设摩擦系数是恒定的。此外,还确定了汽车刹车的区域。
假设制动减速达到峰值,由峰值速度反向计算直线段内达到的最大速度。最后,利用该信息计算总时间。
这一圈速比195米跑道上的最快圈速快了1.5秒左右。仿真结果对选择汽车的最终传动比和确定汽车最佳冷却所需的散热器面积至关重要。从单圈时间模拟中获得的信息也被用于下一节讨论的组件级模拟。
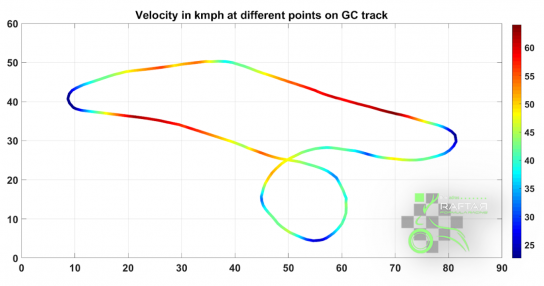
图1所示。在轨道上各点获得的速度
冷却模型
该模型的目标是建立一个工具,可以用来研究所有冷却参数,如散热器面积、相互作用流体的温度和流体的质量流量及其对系统的影响。该模型建立在搭接仿真的基础上,以发动机转速和车速作为输入,计算冷却参数。使用圈速模拟的好处是,它让我们了解了发动机冷却剂的温度在赛道上的变化。在此基础上,对散热器面积和风扇转速进行了选择。
建立模型的第一步是收集轨迹数据,建立发动机热负荷、总换热系数、空气质量流量和水质量流量的数学方程。所有这些方程都使用独立变量输入,如发动机转速或车辆速度,或两者兼有。
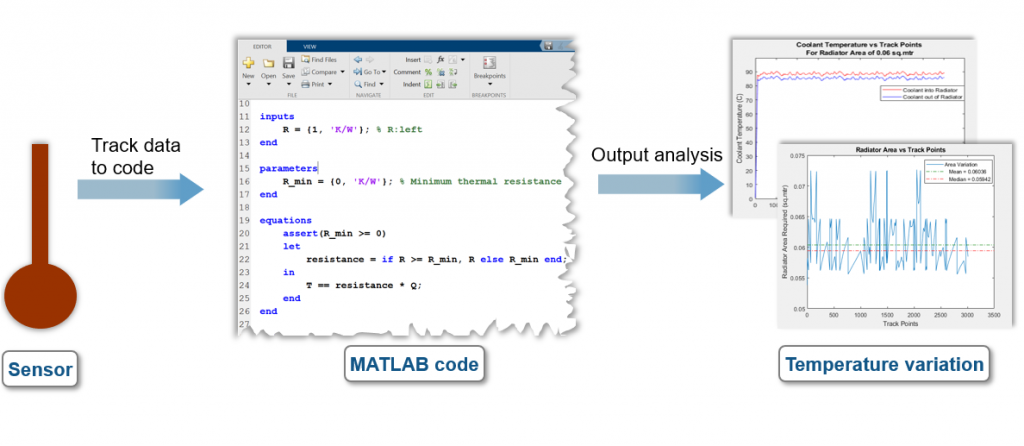
图2所示。冷却模型的工作流程
在推导出方程之后,我们进行了两次模拟。第一个,找到赛道上每一点的面积要求,并决定散热器的面积。发动机冷却液的温度保持恒定,并进行了多圈测试,以确定在赛道的不同区域需要多大的区域。
第二次模拟有助于我们研究选定的散热器面积对温度的影响。在确定散热器区域之前我们对不同区域进行了多次模拟。
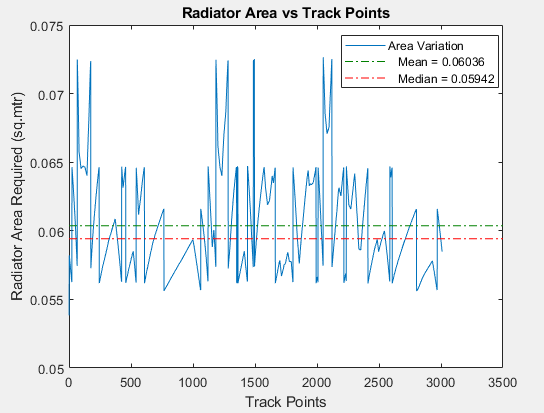
图3所示。赛道上的区域差异
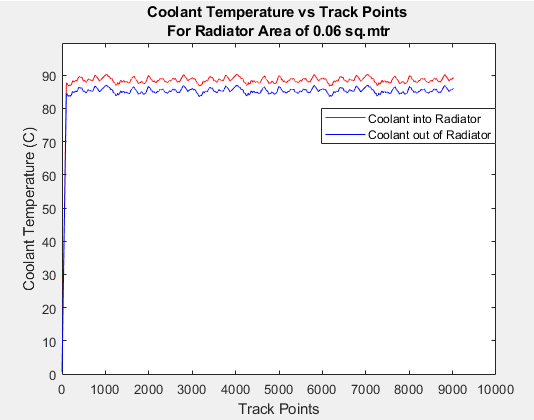
图4所示。发动机冷却液温度的变化
Simscape车辆模型
为了计算峰值减速和车辆停止时间,我们在Simscape中建立了一个模型。该模型还考虑了纵向载荷传递的影响,给出了前后制动压力之间的关系。
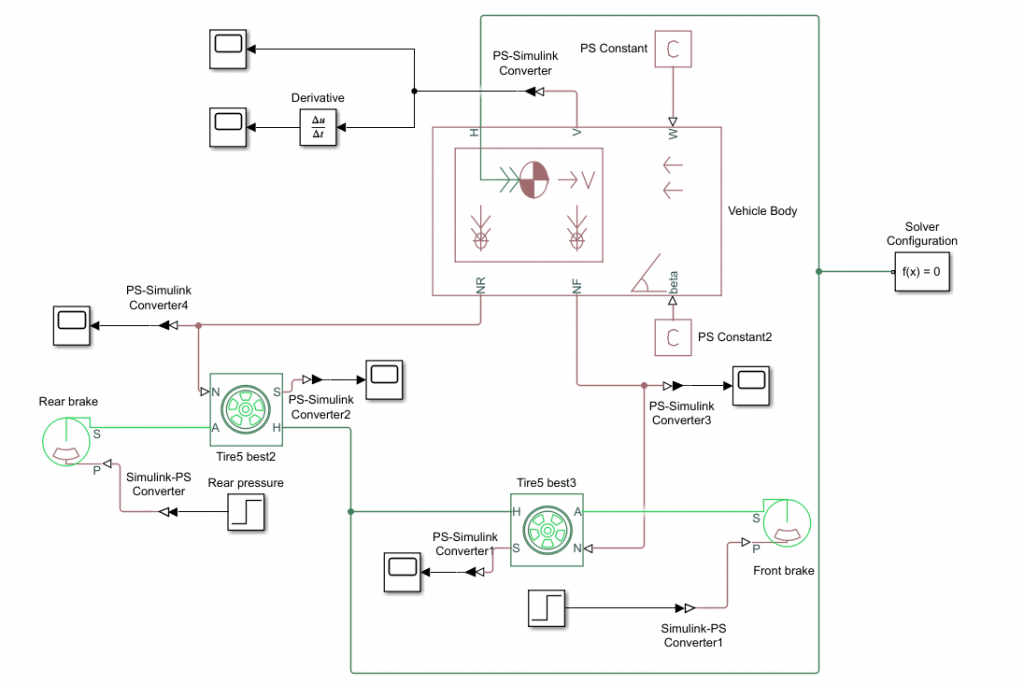
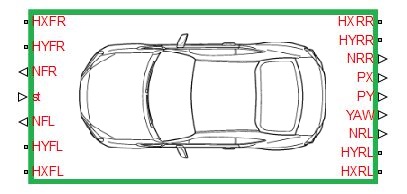
图5所示。Simscape模型
模型的输入是汽车的初始速度,以及前后制动压力。得到的输出是速度、加速度、载荷传递和前后滑移比曲线。该模型由以下子组件组成:
1)车辆的身体
我们使用车身块来建模纵向车辆动力学。该块考虑重量、轴距、重心高度(CG)和初始速度以及其他各种必要的车身参数。它有一个内置的程序,以计算负载转移时,加速度检测。
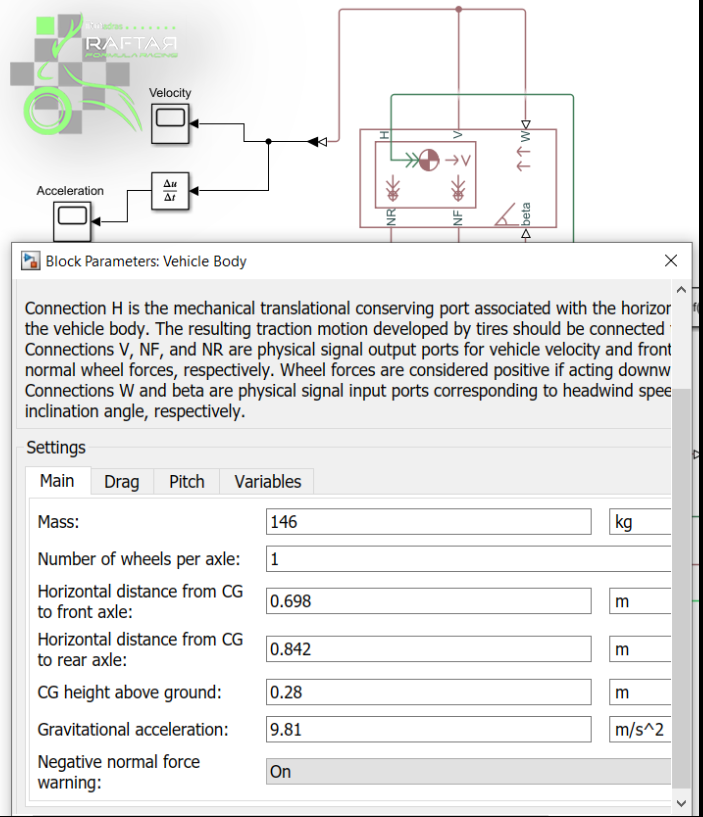
图6所示。车身参数
2)制动模型
Simscape中的转子模型是包含转子几何形状、卡尺几何形状和摩擦系数的数学模型。输入到这个块是制动压力和输出是制动扭矩通过一个旋转的守恒端口。
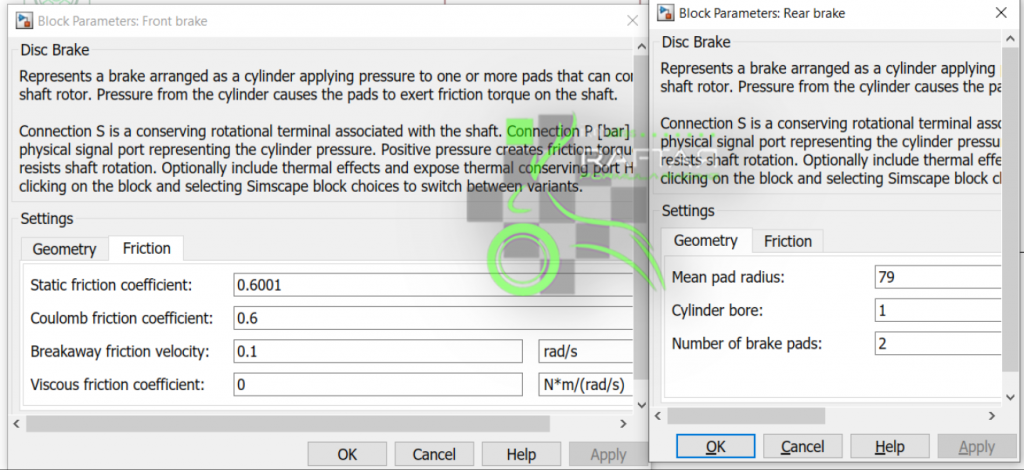
图7所示。盘式制动器参数
3)轮胎模型
在Simscape中,轮胎使用Pacejka 2002模型建模,使用magic公式中的载荷相关纵向系数。除此之外,轮胎尺寸也包括在内。输入为法向载荷,输出滑移率。Hoosier R25B轮胎数据的系数在轮胎块中定义。我们包括了两个块来代表前轮胎和后轮胎。
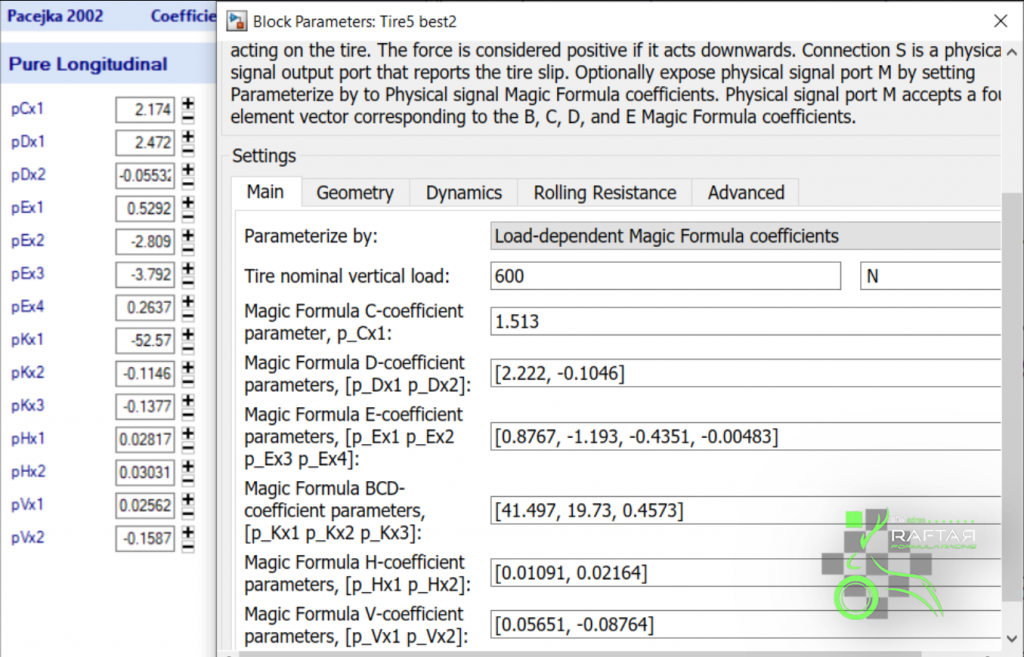
图8所示。轮胎参数
最后,使用物理信号连接所有物理块。车辆模型是通过一个平移保存端口连接到轮胎,这是轮胎的力。此外,这些轮胎通过角机械保护端口连接到制动转子通过转子产生的扭矩作用在轮胎上。车辆的法向力输出进入轮胎。该模型是一个闭环,其中轮胎产生的力馈入车辆,车辆模型在载荷传递过程中计算的法向载荷反馈到轮胎模型。最后,仿真结果提供了制动时的峰值减速和车辆停止时间的信息。
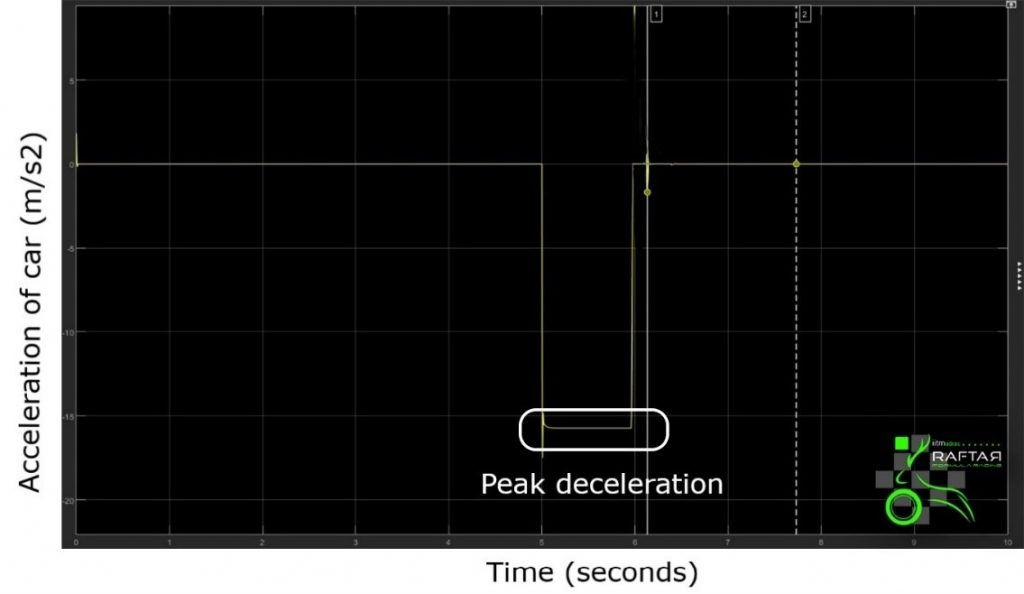
图9所示。峰减速
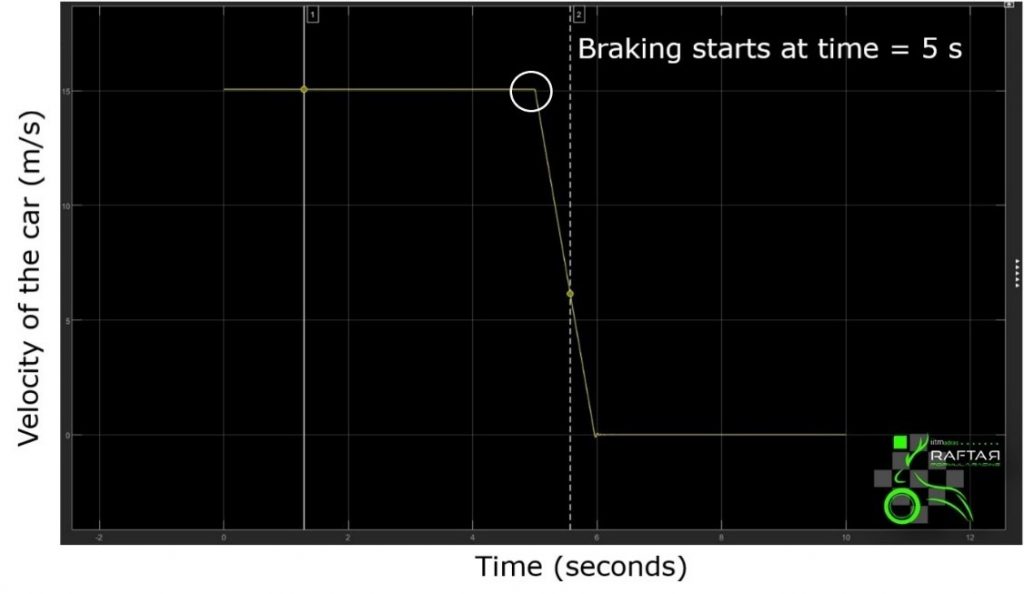
图10所示。制动
我们正在进行的项目
遥测系统
该系统允许车队记录传感器数据,并可视化实时赛车参数。该系统是即插即用的,可以连接到任何can总线系统和定制通道,这是比OEM部件的主要优势。该系统还具有直接连接使用I2C、UART、SPI和各种其他协议通信的传感器的额外功能,并获得由连接到系统的所有信号组成的单一时间同步数据集。
该系统由Raspberry Pi控制,MCP2515板用于CAN-BUS通信,5dBi天线提供足够的遥测范围。在接收坑计算机上,MATLAB和SIMU金宝appLINK金宝app支持包树莓派用于可定制的数据可视化。在树莓派上设置了一个python脚本,用于设置CAN通道和记录SD卡上的数据。树莓派被设置为无线接入点,并托管它的网络,坑计算机通过SSH连接到树莓派并访问数据流。这也允许我们将多个设备连接到由树莓派主持的无线网络,比如我们的扇区计时电路。
我们计划最终将Raspberry Pi用于数据记录和遥测目的,从而消除对额外测井设备的需求。我们也在努力建立树莓派和ECU之间的MODBUS通信链路。这将使我们能够真正同步从ECU和CAN总线分别获得的2个数据流。这允许来自两个系统的传感器之间的传感器融合,使我们能够为发动机控制和主动设备的控制实现更稳健的算法。它还使数据的后处理更简单,因为我们不需要关联共同信号来获得数据集之间的时间同步。一旦实现了这一点,下一步就是使用树莓派控制仪表盘,这样我们就可以在Nextion仪表盘上显示汽车的任何参数。这个方法的最终实现如下所示:
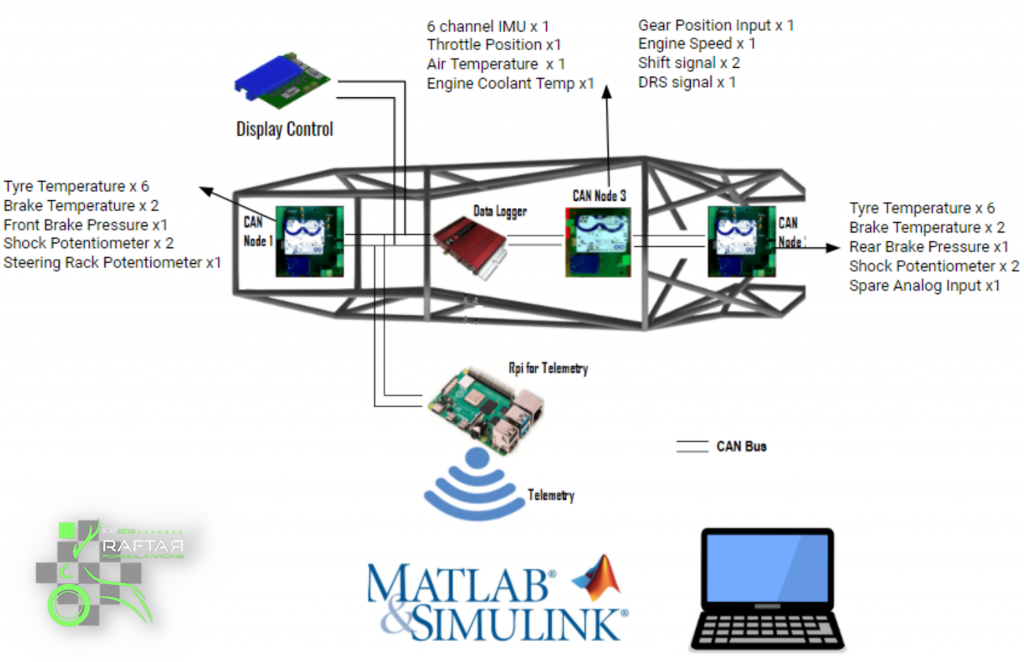
图11所示。CAN总线实现原理图
结论
通过事先进行不同的模拟,我们能够做出关键的设计决策,以参加各种国家和国际比赛。目前,我们的团队正在进行各种项目,以改进车辆的设计。想了解我们的最新进展,欢迎加入我们的脸谱网和Instagram组。
谢谢,
Raftar公式赛车
- 类别:
- 汽车、
- Simscape,
- 金宝app仿真软件,
- 团队的成就






评论
要留下评论,请点击在这里登录到您的MathWorks帐户或创建一个新帐户。