情节
规划车辆路径
描述
例子
规划路径并检查其有效性
利用最优快速探索随机树(RRT*)算法规划车辆通过停车场的路径。检查路径是否有效,然后沿着路径绘制过渡姿势。
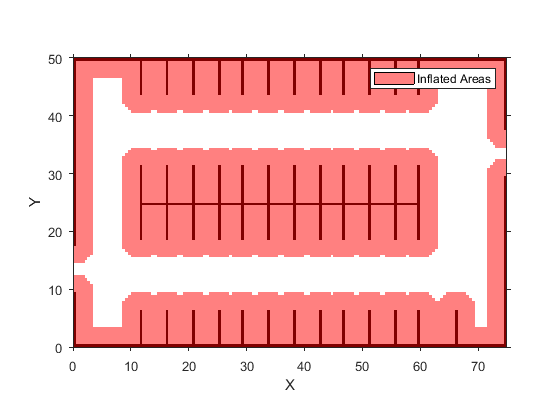
加载一个停车场的成本图。绘制成本图,看到停车场和充气区域的车辆要避免。
数据=负载(“parkingLotCostmap.mat”);costmap = data.parkingLotCostmap;情节(costmap)
定义车辆的起始和目标姿态为[x,y,Θ)向量。的世界单位(x,y)地点以米为单位。的世界单位Θ方向角的单位是度。
startPose = [4,4,90];%[米,米,度]goalPose = [30,13,0];
使用一个pathPlannerRRT对象来规划从开始姿势到目标姿势的路径。
规划师= pathPlannerRRT(成本地图);refPath = plan(planner,startPose,goalPose);
检查路径是否有效。
isPathValid = checkPathValidity(refPath,costmap)
isPathValid =逻辑1
沿着路径插值过渡姿势。
transitionposed =插值(refPath);
在成本图上绘制计划路径和转换姿势。
持有在情节(refPath“DisplayName的”,“计划路径”)散射(transitionPoses (: 1) transitionPoses (:, 2), [],“填充”,...“DisplayName的”,“过渡姿势”)举行从

输入参数
refPath- - - - - -规划车辆路径
开车。路径对象
规划的车辆路径,指定为开车。路径对象。
名称-值参数
指定可选参数对为Name1 = Value1,…,以=家,在那里的名字参数名称和价值对应的值。名称-值参数必须出现在其他参数之后,但对的顺序无关紧要。
在R2021a之前,使用逗号分隔每个名称和值,并将其括起来的名字在报价。
例子:“通货膨胀”,“关闭”
父- - - - - -坐标轴对象
轴对象
对象,指定为逗号分隔的对,由“父”和一个轴对象。如果您没有指定父时,将创建一个新图形。
车辆- - - - - -显示车辆
“上”(默认)|“关闭”
显示车辆,指定为由逗号分隔的对组成“汽车”而且“上”或“关闭”.将此参数设置为“上”沿路径显示车辆。
VehicleDimensions- - - - - -车辆尺寸
vehicleDimensions对象
车辆的尺寸,由逗号分隔的对组成“VehicleDimensions”和一个vehicleDimensions对象。
DisplayName- - - - - -图例中的条目名称
”(默认)|特征向量|字符串标量
图例中条目的名称,指定为逗号分隔的对,由“DisplayName的”和字符向量或字符串标量。
颜色- - - - - -路径颜色
颜色名称|短颜色名|RGB值
路径颜色,指定为由逗号分隔的对组成“颜色”和一个颜色名称,短颜色名称,或RGB三元组。
对于自定义颜色,指定一个RGB三元组。RGB三元组是一个三元素行向量,其元素指定颜色的红、绿和蓝分量的强度。强度必须在这个范围内[0, 1];例如,[0.4 0.6 0.7].或者,您可以通过名称指定一些常用颜色。该表列出了已命名的颜色选项和等效的RGB三元组值。
| 颜色名称 | 简称 | RGB值 | 外观 |
|---|---|---|---|
“红色” |
“r” |
[10 0 0] |
|
“绿色” |
‘g’ |
[0 10 0] |
|
“蓝” |
“b” |
[0 0 1] |
|
“青色” |
“c” |
[0 1 1] |
|
“红色” |
“米” |
[10 0 1] |
|
“黄色” |
“y” |
[11 10 0] |
|
“黑” |
“k” |
[0 0 0] |
|
“白色” |
' w ' |
[1 1 1] |
|
例子:“颜色”,[10 0 1]
例子:“颜色”,“m”
例子:“颜色”,“红色”
标签- - - - - -标记来识别路径
”(默认)|特征向量|字符串标量
标记来标识路径,指定为由逗号分隔的对组成“标签”和字符向量或字符串标量。
版本历史
在R2018a中引入
您也可以从以下列表中选择一个网站: