主要内容
extractEigenFeatures
从点云提取eigenvalue-based功能段
语法
描述
特性= extractEigenFeatures (segmentsIn)segmentsIn。使用这个语法来促进特定片段的选择在一个点云扫描局部特征提取。
(此外返回段从输入中提取点云从先前的语法使用参数的任意组合。使用这个语法方便的可视化片段。特性,segmentsOut)= extractEigenFeatures (___)
例子
从点云提取Eigenvalue-Based特性
加载一个有组织的激光雷达点云。
ld =负载(“drivingLidarPoints.mat”);ptCloud = ld.ptCloud;
段和删除地上飞机。
groundPtsIdx = segmentGroundFromLidarData (ptCloud,“ElevationAngleDelta”15);ptCloud =选择(ptCloud ~ groundPtsIdx,“OutputSize”,“全部”);
集群剩余的50分,最低分集群。
distThreshold = 0.5;%在米minPoints = 50;[标签,numClusters] = segmentLidarData (ptCloud distThreshold,“NumClusterPoints”,minPoints);
提取eigenvalue-based从点云的特性和相应的部分。
(特性、段)= extractEigenFeatures (ptCloud、标签)
特点=17×1对象16 x1 eigenFeature数组属性:重心⋮特性
段=17×1对象16 x1 pointCloud数组属性:位置计数XLimits YLimits ZLimits⋮颜色正常的强度
匹配Eigenvalue-Based点云之间的特性
创建一个调速发电机PCAP文件阅读器。
veloReader = velodyneFileReader (“lidarData_ConstructionRoad.pcap”,“HDL32E”);
读第一和第四的扫描文件。
ptCloud1 = readFrame (veloReader, 1);ptCloud2 = readFrame (veloReader 4);
删除扫描的地平面。
maxDistance = 1;%在米referenceVector = (0 0 1);[~,~,selectIdx] = pcfitplane (ptCloud1、maxDistance referenceVector);ptCloud1 =选择(ptCloud1 selectIdx,“OutputSize”,“全部”);[~,~,selectIdx] = pcfitplane (ptCloud2、maxDistance referenceVector);ptCloud2 =选择(ptCloud2 selectIdx,“OutputSize”,“全部”);
集群的集群云至少10分。
minDistance = 2;%在米minPoints = 10;labels1 = pcsegdist (ptCloud1 minDistance,“NumClusterPoints”,minPoints);labels2 = pcsegdist (ptCloud2 minDistance,“NumClusterPoints”,minPoints);
提取提取从每个点云的特性和相应的部分。
[eigFeatures1, segments1] = extractEigenFeatures (ptCloud1 labels1);[eigFeatures2, segments2] = extractEigenFeatures (ptCloud2 labels2);
创建矩阵的特性和质心提取每个点云匹配。
features1 = vertcat (eigFeatures1.Feature);features2 = vertcat (eigFeatures2.Feature);centroids1 = vertcat (eigFeatures1.Centroid);centroids2 = vertcat (eigFeatures2.Centroid);
找到公认的特征匹配。
indexPairs = pcmatchfeatures (features1 features2,…pointCloud (centroids1) pointCloud (centroids2));
得到匹配段和可视化功能。
matchedSegments1 = segments1 (indexPairs (: 1));matchedSegments2 = segments2 (indexPairs (:, 2));matchedFeatures1 = eigFeatures1 (indexPairs (: 1));matchedFeatures2 = eigFeatures2 (indexPairs (:, 2));
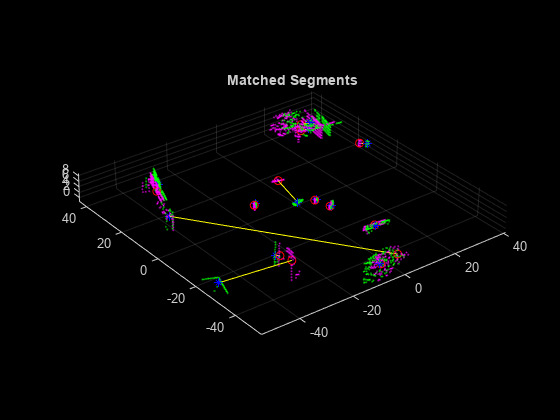
可视化匹配。
图pcshowMatchedFeatures (matchedSegments1 matchedSegments2、matchedFeatures1 matchedFeatures2)标题(“匹配段”)
输入参数
输出参数
引用
[1]Weinmann, M。,B. Jutzi, and C. Mallet. “Semantic 3D Scene Interpretation: A Framework Combining Optimal Neighborhood Size Selection with Relevant Features.”ISPRS年报的摄影测量、遥感和空间信息科学II-3(2014年8月7日):181 - 88。https://doi.org/10.5194/isprsannals - ii - 3 - 181 - 2014。
另请参阅
功能
extractFPFHFeatures|pcmatchfeatures|pcsegdist|pcshowMatchedFeatures|scanContextDescriptor|segmentLidarData
对象
介绍了R2021a