主要内容
pcmapsegmatch
用于定位和环路闭合检测的段和特征图
描述
创建
属性
对象的功能
addView |
添加视图到映射 |
deleteView |
从地图中删除视图 |
findView |
检索特征和段索引对应的地图视图 |
hasView |
检查视图是否在地图中 |
deleteSegments |
删除地图中的所有片段 |
findPose |
在地图中找到对段匹配的绝对姿势 |
updateMap |
更新地图中的质心和点云段位置 |
selectSubmap |
选择映射中的子映射 |
isInsideSubmap |
检查查询位置是否在选定的子映射内 |
显示 |
在地图上可视化点云段 |
例子
基于分段匹配的激光雷达定位
从MAT文件加载片段和特征的地图。地图中的点云数据是使用模拟3 d激光雷达(无人机工具箱)块。
data =负载(“segmatchMapFullParkingLot.mat”);sMap = data.segmatchMapFullParkingLot;
从MAT文件加载点云扫描。
data =负载(“fullParkingLotData.mat”);ptCloudScans = data.fullParkingLotData;
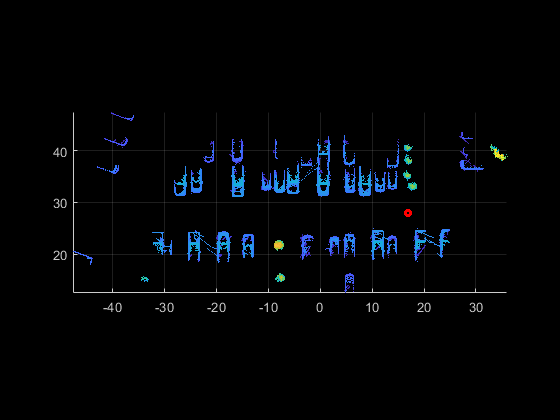
显示区段的地图。
ax =显示(sMap);
将视角改为俯视图。
视图(2)暂停(0.2)
设置选择圆柱形邻域的半径。
outerCylinderRadius = 20;innerCylinderRadius = 3;
设置分割的阈值参数。
distThreshold = 0.5;angleThreshold = 180;
设置所选子映射的大小和子映射阈值参数
Sz = [65 30 20];submapThreshold = 10;
为可视化设置半径参数。
半径= 0.5;
对每个点云进行分割,通过寻找分段匹配进行定位。
为n = 1:numel(ptCloudScans) ptCloud = ptCloudScans(n);%切割并拆除接地面。groundPtsIdx = segmentGroundFromLidarData (ptCloud,“ElevationAngleDelta”11);ptCloud =选择(ptCloud ~ groundPtsIdx,“OutputSize”,“全部”);%选择圆柱形邻域。dist =√ptCloud.Location(:,: 1)。^ 2 + ptCloud.Location (:: 2) ^ 2);drawtext_fix (): drawtext_fix () = dist <= dist;ptCloud =选择(ptCloud cylinderIdx,“OutputSize”,“全部”);%分割点云。标签= segmentLidarData (ptCloud distThreshold angleThreshold,“NumClusterPoints”[5000]);%从点云中提取特征。(特性、段)= extractEigenFeatures (ptCloud、标签);%定位,找到地图中的绝对姿势,以对齐段匹配。[absPoseMap, ~, inlierFeatures inlierSegments] = findPose (sMap,特性,段);如果isempty (absPoseMap)继续;结束%在地图上显示估计的位置。poseTranslation = absPoseMap.Translation;pos = [poseTranslation(1:2) radius];showShape (“圆”、pos、“颜色”,“r”,“父”、ax);暂停(0.2)%确定所选的子映射是否需要更新。[isInside, distToEdge] = isInsideSubmap (sMap, poseTranslation);needSelectSubmap = ~ isInside...当前姿势在子映射之外|| any(distToEdge(1:2) < submapThreshold)...当前姿势接近子地图边缘|| n == 1;%第一次使用整个地图进行本地化%选择一个新的子映射。如果needSelectSubmap sMap = selectSubmap(sMap,poseTranslation,sz);结束结束
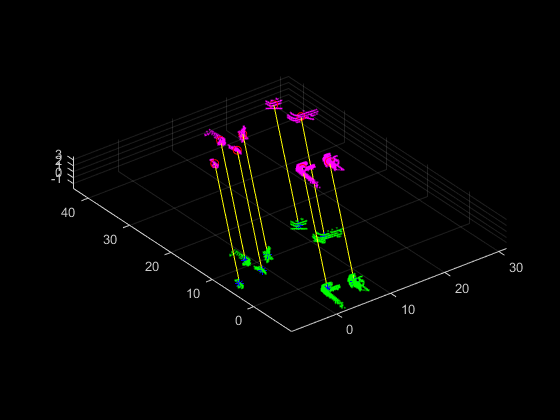
%可视化最后匹配的段。图;pcshowMatchedFeatures (inlierSegments (: 1) inlierSegments (:, 2), inlierFeatures (: 1), inlierFeatures (:, 2))
参考文献
Dube, Renaud, Daniel Dugas, Elena Stumm, Juan Nieto, Roland Siegwart和Cesar Cadena。“分割匹配:基于分割的三维点云位置识别”。在2017 IEEE机器人与自动化国际会议(ICRA), 5266 - 72。新加坡,新加坡:IEEE, 2017。https://doi.org/10.1109/ICRA.2017.7989618。
另请参阅
功能
对象
介绍了R2021a
你也可以从以下列表中选择一个网站: