主要内容
导航和映射
点云登记和地图建筑,2-D和3-D SLAM和2-D障碍物检测
高级驾驶员辅助系统(ADA)应用和自治机器人的关键组件是实现车辆或机器人在其周围环境以及使用此信息来估计其目的地的最佳路径的地方的意识。同时定位和映射(SLAM)过程使用算法在同时估计车辆的姿势和环境的地图。
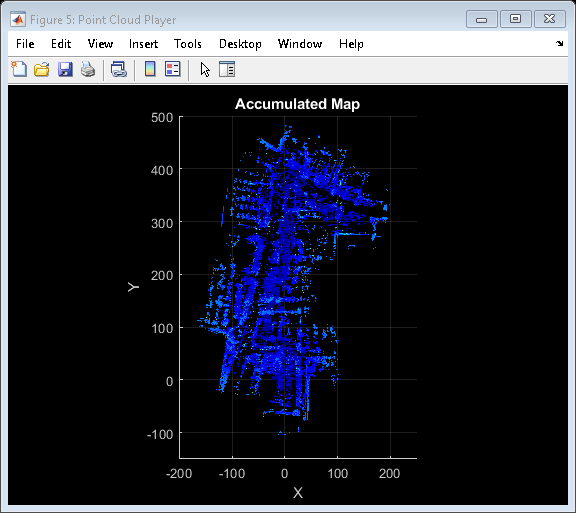
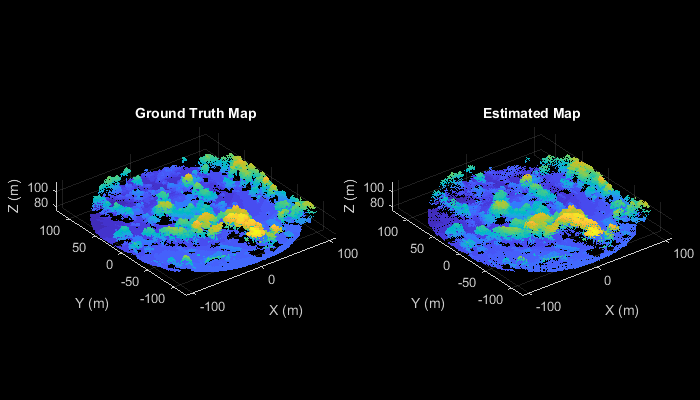
LIDAR Toolbox™提供了一种点云注册工作流,它使用快速点特征直方图(FPFH)算法缝合点云序列。您可以使用此功能进行渐进式地图建设。这样的地图可以促进车辆导航的路径规划,或者可以用于SLAM。有关如何使用的示例提取效果在3-D SLAM工作流程中的空中数据,参见使用FPFH描述符的空中LIDAR SLAM。
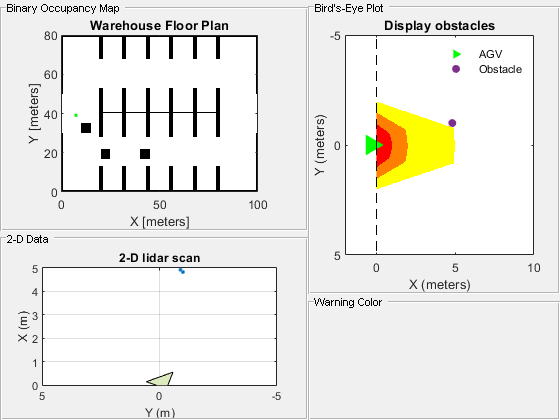
LIDAR Toolbox还提供扫描匹配和模拟范围传感器读数的功能。这些功能用于2-D SLAM和障碍物检测工作流程
功能
话题
了解点云注册和映射工作流程。
此示例显示如何估算两个点云之间的刚性转换。
此示例显示如何使用点云之间的相应功能pcmatchfeatures.使用和可视化它们pcshowmatchedfeatures.功能。
特色例子


您还可以从以下列表中选择一个网站: