主要内容
标记,分割和检测
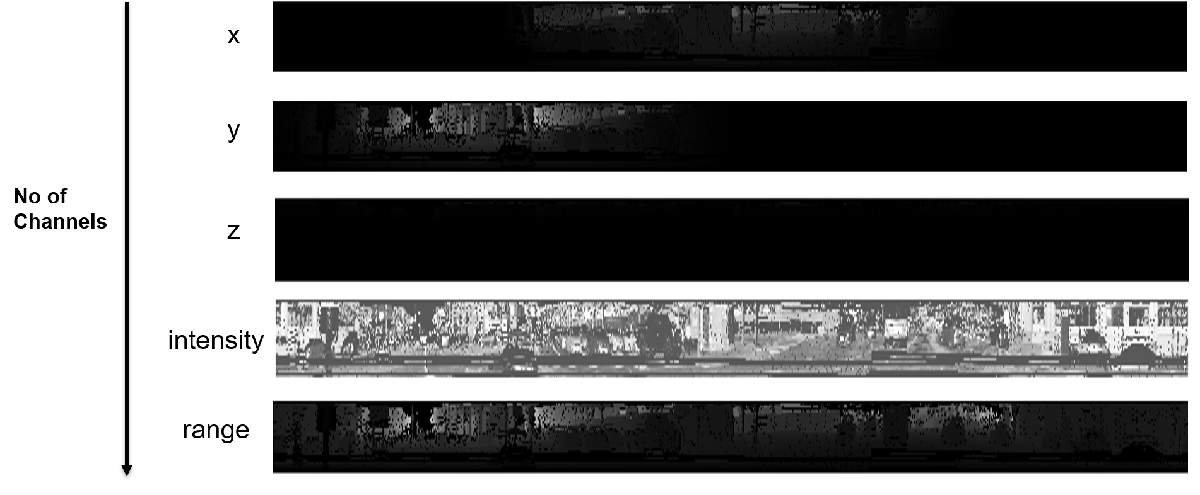
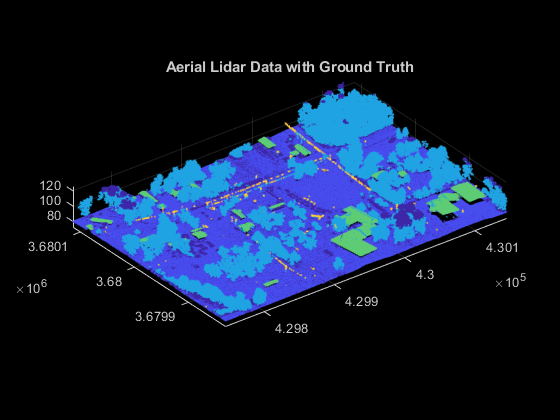
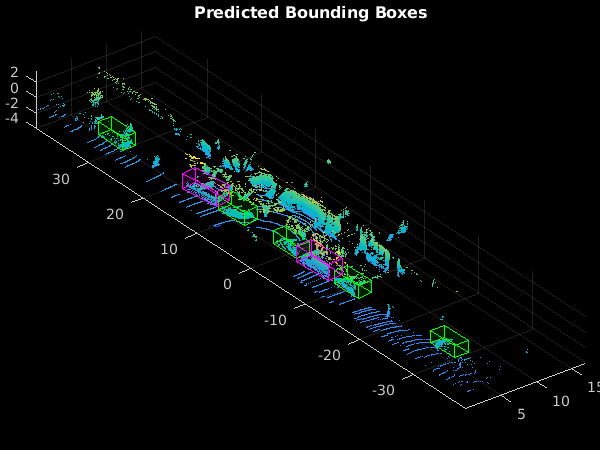
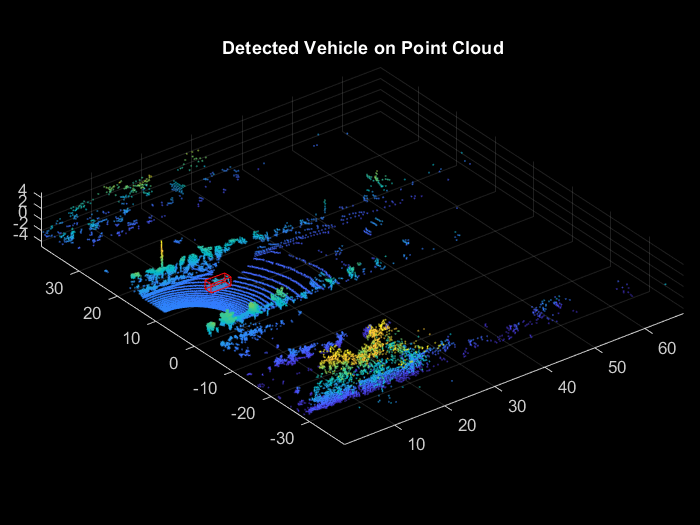
使用深度学习和几何算法点云数据中的标签,段,检测和跟踪对象
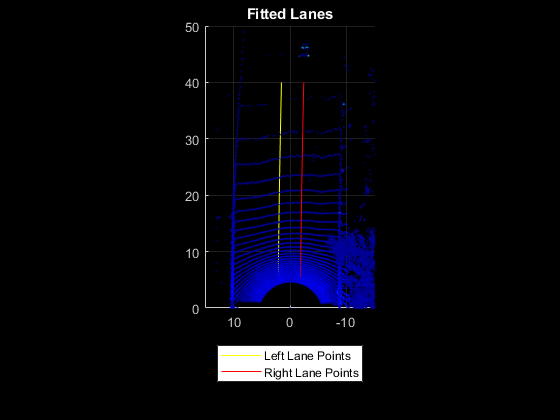
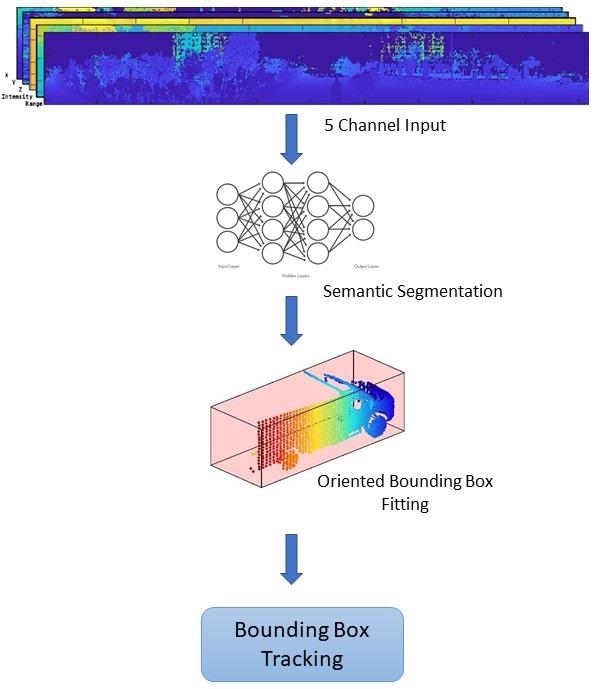
LIDAR Toolbox™包括几何和预先培训的深度学习算法,用于分段点云数据以及检测和跟踪感兴趣的对象。您可以将高级驾驶员辅助系统(ADAS)应用程序应用于分段和检测车辆。你可以使用Lidar Labeler.应用程序为深度学习算法准备标记的培训数据。
突出显示主题
特色例子

您还可以从以下列表中选择一个网站: