主要内容
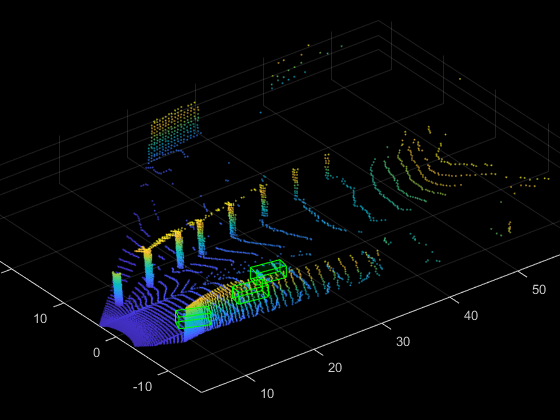
检测和跟踪
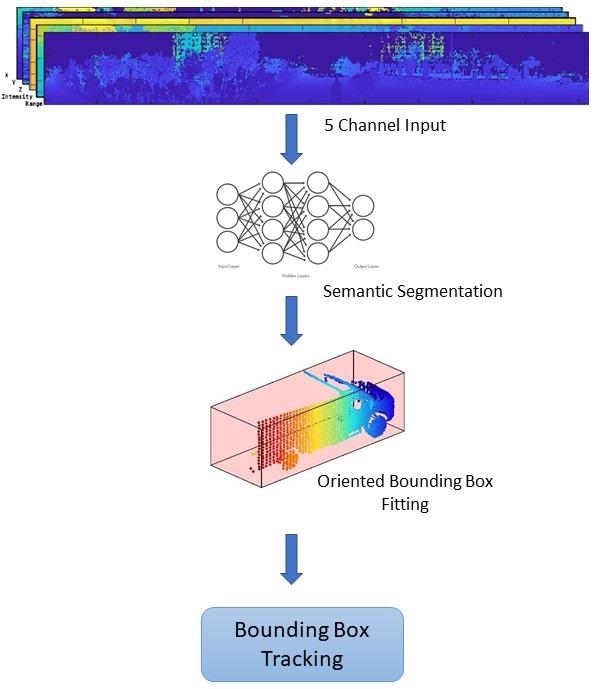
LIDAR点云数据中的物体检测,形状配件和跟踪
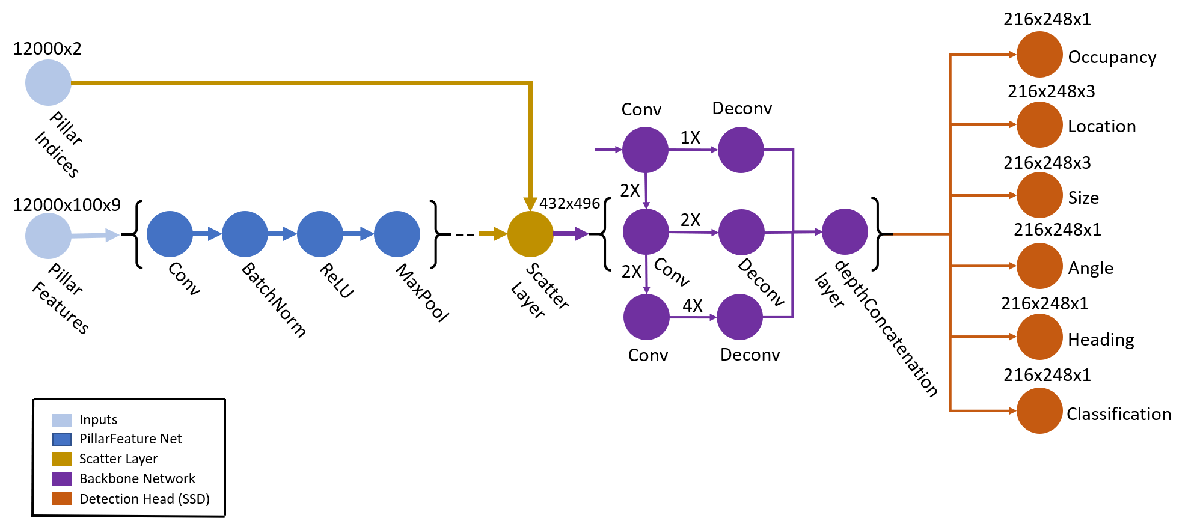
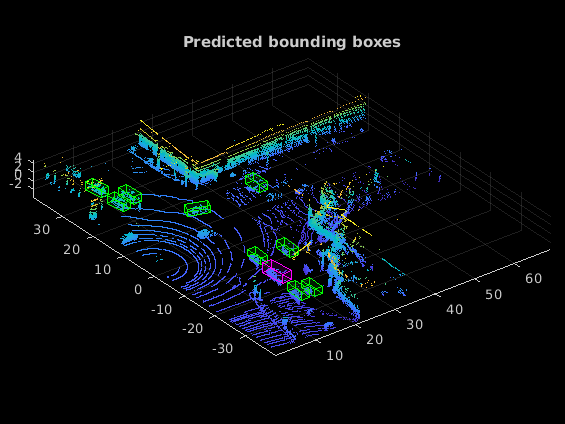
对象检测是主要的LIDAR应用之一。在LIDAR点云数据中检测到的对象对于诸如跟踪和标记的下游工作流程至关重要。LIDAR Toolbox™提供了用于开发自定义对象检测模型的对象检测CNN PointPillars。
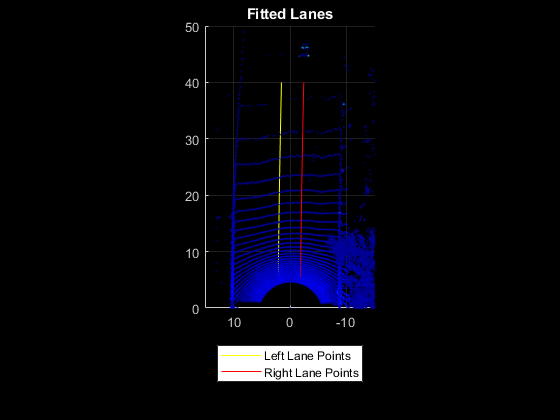
LIDAR Toolbox为车辆和公路车道提供检测和跟踪工作流程。大多数跟踪工作流使用联合概率数据关联(JPDA)跟踪器。
职能
话题
特色例子
你也可以从以下列表中选择一个网站: