主要内容
分割
使用深度学习和几何算法分割点云数据
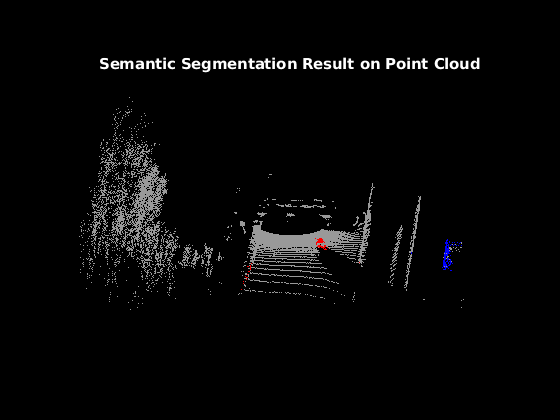
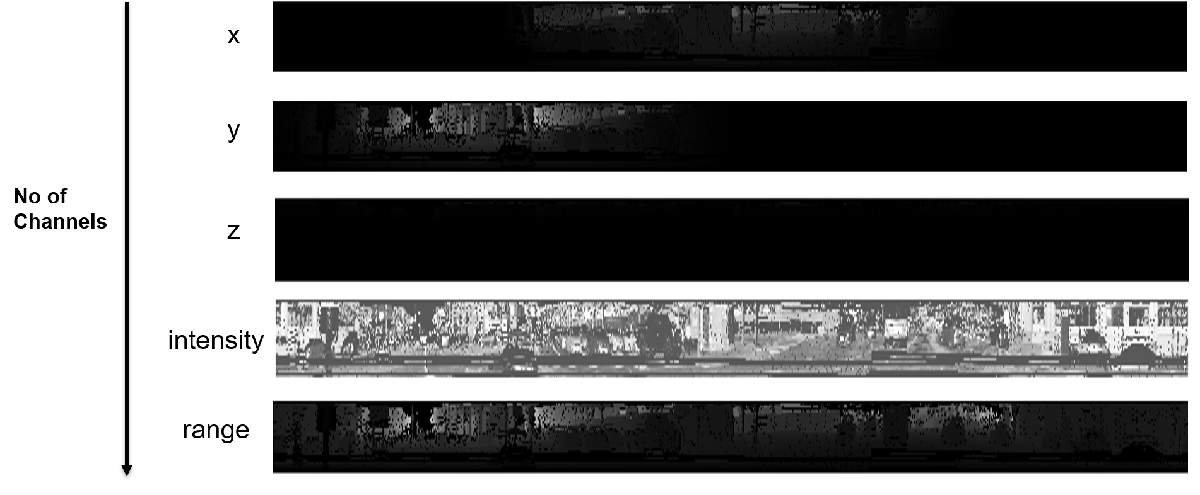
语义分割将三维点云中的每个点与类标签关联起来,例如车,卡车,地面,或植被.Lidar Toolbox™提供深度学习算法对点云数据进行语义分割。使用PointSeg, SqueezeSegV2和PointNet++卷积神经网络(CNN)开发语义分割模型。
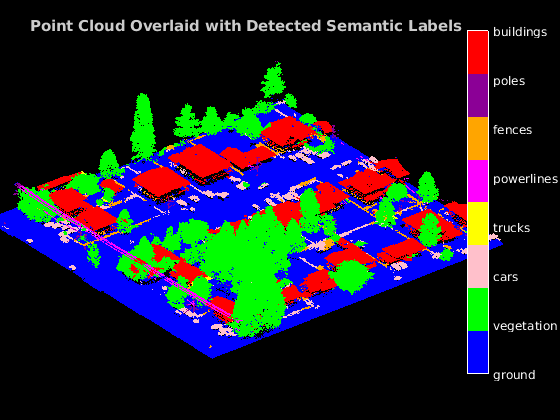
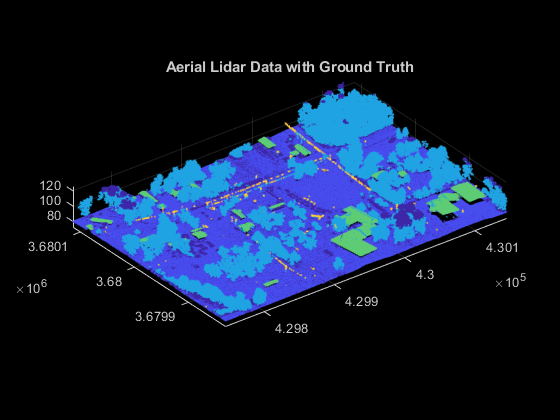
你可以用点云数据分割地面segmentGroundSMRF函数。它被用在航空激光雷达数据的地形分类在空中点云中分割地面、植被和建筑物的工作流。
功能
主题
了解如何使用点云进行深度学习。
定义PointNet++网络并学习如何使用它执行语义分割。
用于深度学习的数据存储(深度学习工具箱)
学习如何在深度学习应用程序中使用数据存储。
深度学习层列表(深度学习工具箱)
发现MATLAB中所有的深度学习层®.
特色的例子

你也可以从以下列表中选择一个网站: